 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-UAV Visual Coverage of Partially Known 3D Surfaces: Voronoi-based Initialization to Improve Local Optimizers
Jan 30, 2019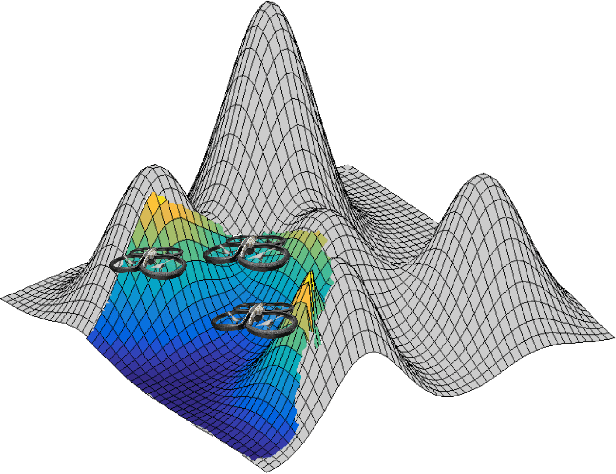

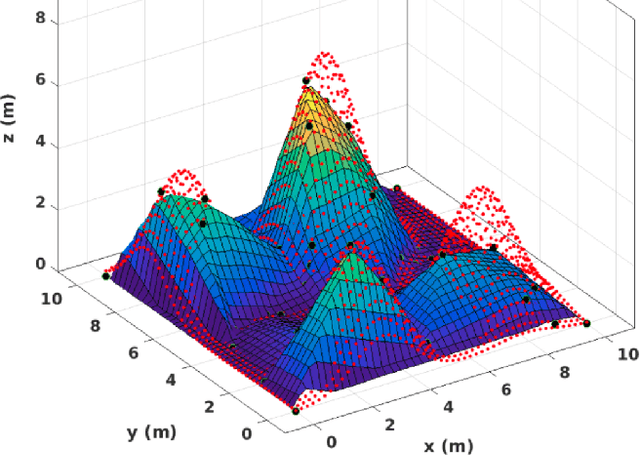
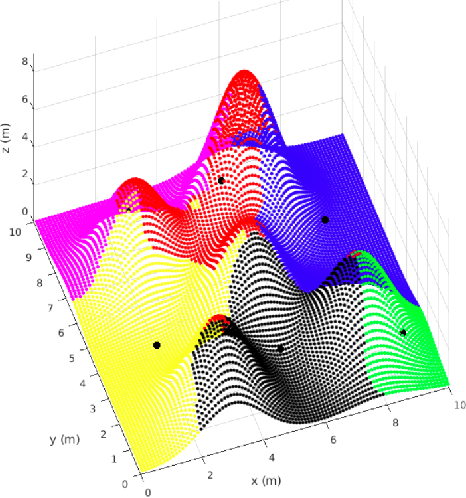
In this paper we study the problem of steering a team of Unmanned Aerial Vehicles (UAVs) toward a static configuration which maximizes the visibility of a 3D environment. The UAVs are assumed to be equipped with visual sensors constrained by a maximum sensing range and the prior knowledge on the environment is considered to be very sparse. To solve this problem on-line, derivative-free measurement-based optimization algorithms can be adopted, even though they are strongly limited by local optimality. To overcome this limitation, we propose to exploit the partial initial knowledge on the environment to find suitable initial configurations from which the agents start the local optimization. In particular, a constrained centroidal Voronoi tessellation on a coarse approximation of the surface to cover is proposed. The behavior of the agent is so based on a two-step optimization approach, where a stochastic optimization algorithm based on the on-line acquired information follows the geometrical-based initialization. The algorithm performance is evaluated in simulation and in particular the improvement on the solution brought by the Voronoi tessellation with respect to different initializations is analyzed.