 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Active Learning for Biased Datasets via Fisher Kernel Self-Supervision
Mar 01, 2020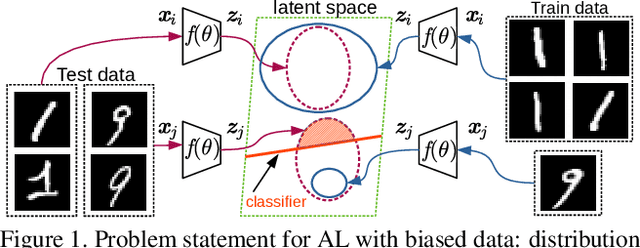
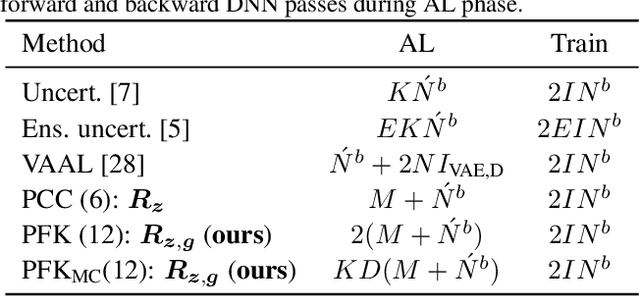
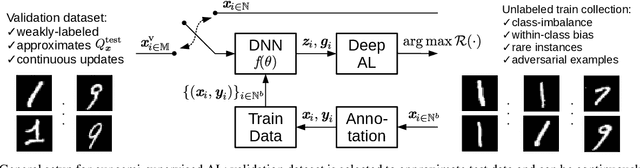
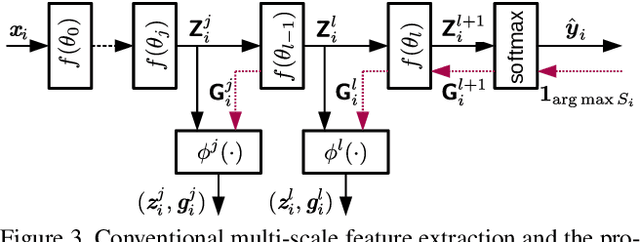
Active learning (AL) aims to minimize labeling efforts for data-demanding deep neural networks (DNNs) by selecting the most representative data points for annotation. However, currently used methods are ill-equipped to deal with biased data. The main motivation of this paper is to consider a realistic setting for pool-based semi-supervised AL, where the unlabeled collection of train data is biased. We theoretically derive an optimal acquisition function for AL in this setting. It can be formulated as distribution shift minimization between unlabeled train data and weakly-labeled validation dataset. To implement such acquisition function, we propose a low-complexity method for feature density matching using self-supervised Fisher kernel (FK) as well as several novel pseudo-label estimators. Our FK-based method outperforms state-of-the-art methods on MNIST, SVHN, and ImageNet classification while requiring only 1/10th of processing. The conducted experiments show at least 40% drop in labeling efforts for the biased class-imbalanced data compared to existing methods.
DoorGym: A Scalable Door Opening Environment And Baseline Agent
Aug 07, 2019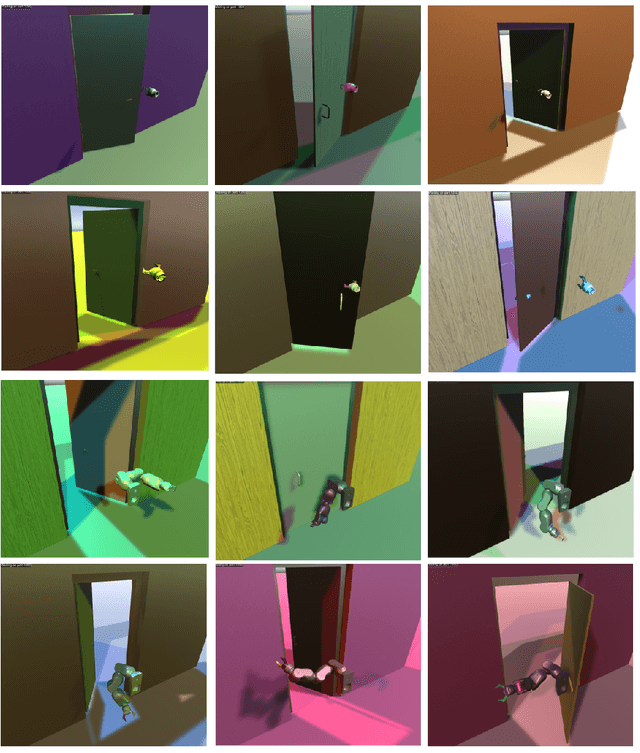
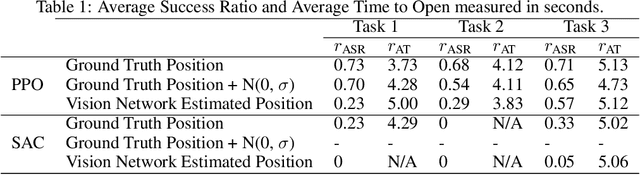
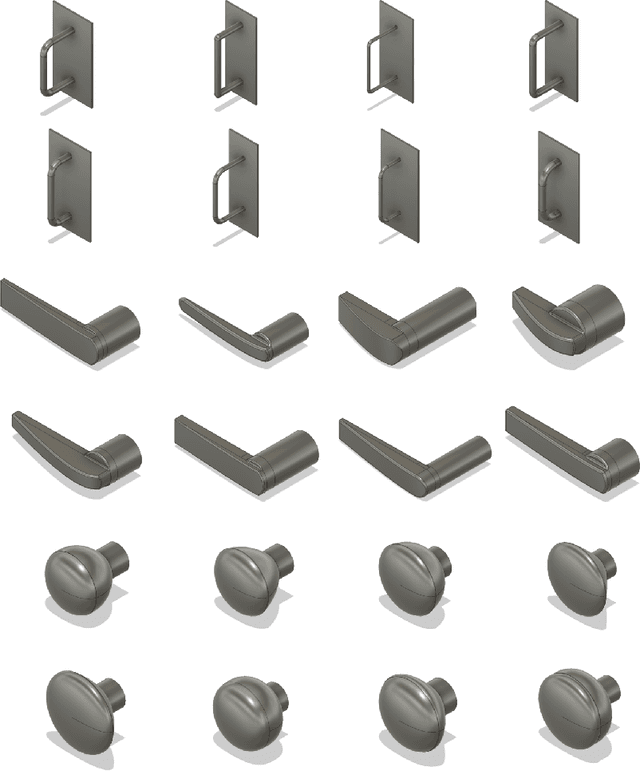
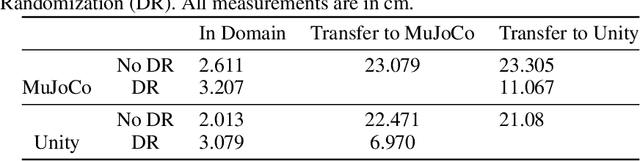
Reinforcement Learning (RL) has brought forth ideas of autonomous robots that can navigate real-world environments with ease, aiding humans in a variety of tasks. RL agents have just begun to make their way out of simulation into the real world. Once in the real world, benchmark tasks often fail to transfer into useful skills. We introduce DoorGym, a simulation environment intended to be the first step to move RL from toy environments towards useful atomic skills that can be composed and extended towards a broader goal. DoorGym is an open-source door simulation framework designed to be highly configurable. We also provide a baseline PPO (Proximal Policy Optimization) and SAC (Soft Actor-Critic)implementation, which achieves a success rate of up to 70% for common tasks in this environment. Environment kit available here:https://github.com/PSVL/DoorGym/
Explain to Fix: A Framework to Interpret and Correct DNN Object Detector Predictions
Nov 19, 2018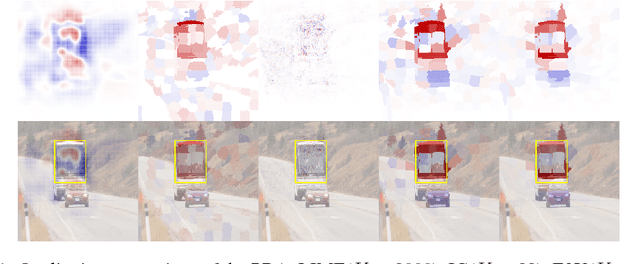
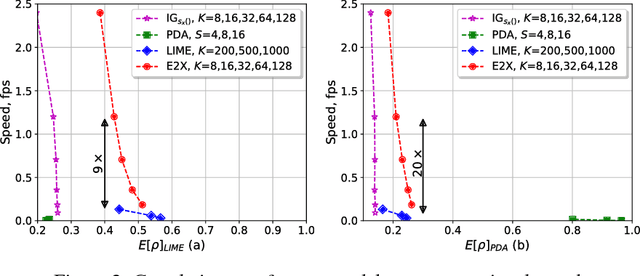
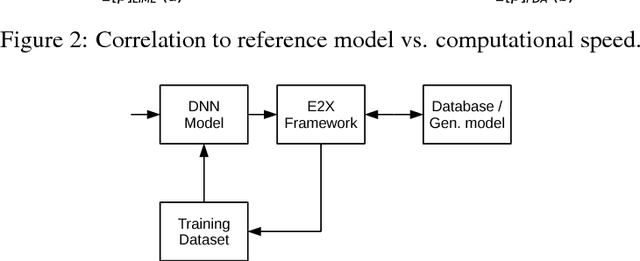
Explaining predictions of deep neural networks (DNNs) is an important and nontrivial task. In this paper, we propose a practical approach to interpret decisions made by a DNN object detector that has fidelity comparable to state-of-the-art methods and sufficient computational efficiency to process large datasets. Our method relies on recent theory and approximates Shapley feature importance values. We qualitatively and quantitatively show that the proposed explanation method can be used to find image features which cause failures in DNN object detection. The developed software tool combined into the "Explain to Fix" (E2X) framework has a factor of 10 higher computational efficiency than prior methods and can be used for cluster processing using graphics processing units (GPUs). Lastly, we propose a potential extension of the E2X framework where the discovered missing features can be added into training dataset to overcome failures after model retraining.
DNN Feature Map Compression using Learned Representation over GF(2)
Aug 15, 2018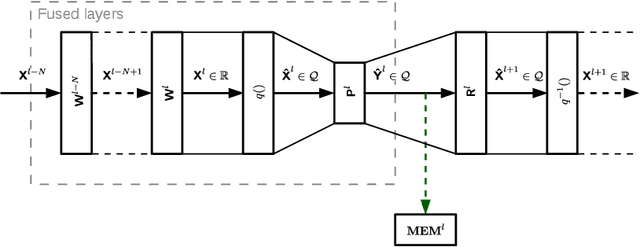
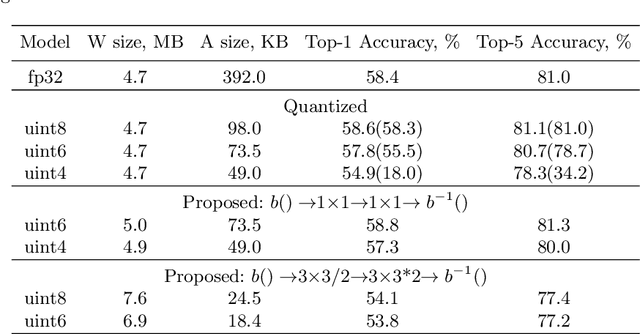
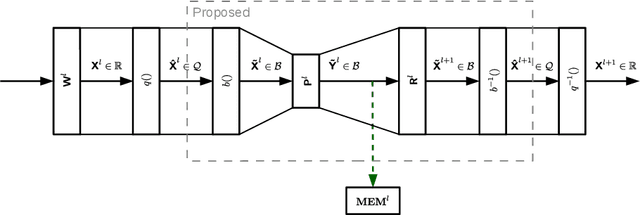
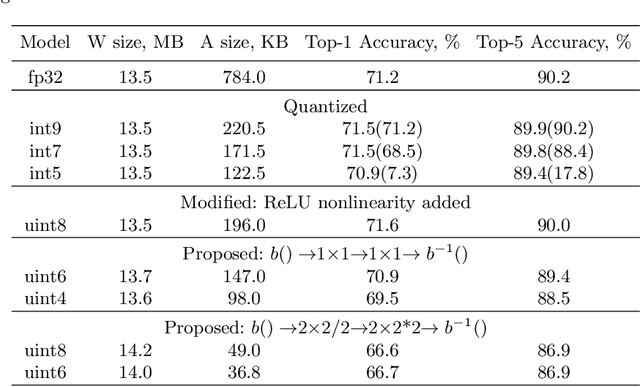
In this paper, we introduce a method to compress intermediate feature maps of deep neural networks (DNNs) to decrease memory storage and bandwidth requirements during inference. Unlike previous works, the proposed method is based on converting fixed-point activations into vectors over the smallest GF(2) finite field followed by nonlinear dimensionality reduction (NDR) layers embedded into a DNN. Such an end-to-end learned representation finds more compact feature maps by exploiting quantization redundancies within the fixed-point activations along the channel or spatial dimensions. We apply the proposed network architectures derived from modified SqueezeNet and MobileNetV2 to the tasks of ImageNet classification and PASCAL VOC object detection. Compared to prior approaches, the conducted experiments show a factor of 2 decrease in memory requirements with minor degradation in accuracy while adding only bitwise computations.