 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Lightweight Fiducial-Based Pipeline for 3D Hyperspectral Mapping of ex-vivo Lumpectomy Specimens
Jun 12, 2026Hyperspectral Imaging (HSI) is a promising modality for intraoperative assessment of resection margins in Breast-Conserving Surgery (BCS), but its clinical translation requires aligning the inherently 2D spectral information onto the 3D shape of the excised tissue so that suspicious regions can be precisely localized for targeted follow-up. We present a fully automated, calibration-free pipeline that produces a 3D hyperspectral point cloud of an ex-vivo lumpectomy specimen from a set of consumer-camera RGB images and a single top-down HSI acquisition. The 3D geometry is reconstructed with a deep-learning Structure-from-Motion backbone, stabilized in a metric reference frame by a custom bundle adjustment that enforces consistency on the corners of four ArUco markers placed around the specimen. The HSI cube is then registered to the reconstruction without recovering the HSI camera pose: the markers, visible in both modalities, define 16 corner correspondences that drive a planar homography, and 3D coordinates are recovered by lookup on an orthographically rendered depth map. Evaluated on two ex-vivo lumpectomy specimens, the pipeline achieves a median 3D registration error below 1~mm and a 2D reprojection error below 0.02 mm, with a total per-specimen processing time under 4 minutes on accelerated hardware. These results support the feasibility of integrating HSI-guided spatial localization into intraoperative margin assessment workflows for breast-conserving surgery.
Adapting Foundation Models for Annotation-Efficient Adnexal Mass Segmentation in Cine Images
Apr 09, 2026Adnexal mass evaluation via ultrasound is a challenging clinical task, often hindered by subjective interpretation and significant inter-observer variability. While automated segmentation is a foundational step for quantitative risk assessment, traditional fully supervised convolutional architectures frequently require large amounts of pixel-level annotations and struggle with domain shifts common in medical imaging. In this work, we propose a label-efficient segmentation framework that leverages the robust semantic priors of a pretrained DINOv3 foundational vision transformer backbone. By integrating this backbone with a Dense Prediction Transformer (DPT)-style decoder, our model hierarchically reassembles multi-scale features to combine global semantic representations with fine-grained spatial details. Evaluated on a clinical dataset of 7,777 annotated frames from 112 patients, our method achieves state-of-the-art performance compared to established fully supervised baselines, including U-Net, U-Net++, DeepLabV3, and MAnet. Specifically, we obtain a Dice score of 0.945 and improved boundary adherence, reducing the 95th-percentile Hausdorff Distance by 11.4% relative to the strongest convolutional baseline. Furthermore, we conduct an extensive efficiency analysis demonstrating that our DINOv3-based approach retains significantly higher performance under data starvation regimes, maintaining strong results even when trained on only 25% of the data. These results suggest that leveraging large-scale self-supervised foundations provides a promising and data-efficient solution for medical image segmentation in data-constrained clinical environments. Project Repository: https://github.com/FrancescaFati/MESA
Self-Supervised Contrastive Embedding Adaptation for Endoscopic Image Matching
Dec 11, 2025
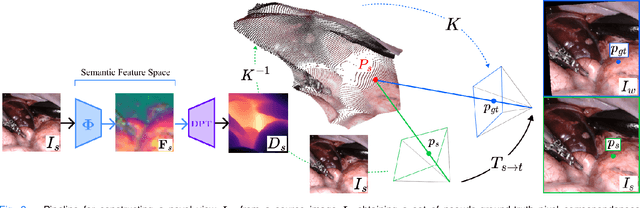


Accurate spatial understanding is essential for image-guided surgery, augmented reality integration and context awareness. In minimally invasive procedures, where visual input is the sole intraoperative modality, establishing precise pixel-level correspondences between endoscopic frames is critical for 3D reconstruction, camera tracking, and scene interpretation. However, the surgical domain presents distinct challenges: weak perspective cues, non-Lambertian tissue reflections, and complex, deformable anatomy degrade the performance of conventional computer vision techniques. While Deep Learning models have shown strong performance in natural scenes, their features are not inherently suited for fine-grained matching in surgical images and require targeted adaptation to meet the demands of this domain. This research presents a novel Deep Learning pipeline for establishing feature correspondences in endoscopic image pairs, alongside a self-supervised optimization framework for model training. The proposed methodology leverages a novel-view synthesis pipeline to generate ground-truth inlier correspondences, subsequently utilized for mining triplets within a contrastive learning paradigm. Through this self-supervised approach, we augment the DINOv2 backbone with an additional Transformer layer, specifically optimized to produce embeddings that facilitate direct matching through cosine similarity thresholding. Experimental evaluation demonstrates that our pipeline surpasses state-of-the-art methodologies on the SCARED datasets improved matching precision and lower epipolar error compared to the related work. The proposed framework constitutes a valuable contribution toward enabling more accurate high-level computer vision applications in surgical endoscopy.
UnReflectAnything: RGB-Only Highlight Removal by Rendering Synthetic Specular Supervision
Dec 11, 2025Specular highlights distort appearance, obscure texture, and hinder geometric reasoning in both natural and surgical imagery. We present UnReflectAnything, an RGB-only framework that removes highlights from a single image by predicting a highlight map together with a reflection-free diffuse reconstruction. The model uses a frozen vision transformer encoder to extract multi-scale features, a lightweight head to localize specular regions, and a token-level inpainting module that restores corrupted feature patches before producing the final diffuse image. To overcome the lack of paired supervision, we introduce a Virtual Highlight Synthesis pipeline that renders physically plausible specularities using monocular geometry, Fresnel-aware shading, and randomized lighting which enables training on arbitrary RGB images with correct geometric structure. UnReflectAnything generalizes across natural and surgical domains where non-Lambertian surfaces and non-uniform lighting create severe highlights and it achieves competitive performance with state-of-the-art results on several benchmarks. Project Page: https://alberto-rota.github.io/UnReflectAnything/
Implementation and Assessment of an Augmented Training Curriculum for Surgical Robotics
Jul 10, 2025The integration of high-level assistance algorithms in surgical robotics training curricula may be beneficial in establishing a more comprehensive and robust skillset for aspiring surgeons, improving their clinical performance as a consequence. This work presents the development and validation of a haptic-enhanced Virtual Reality simulator for surgical robotics training, featuring 8 surgical tasks that the trainee can interact with thanks to the embedded physics engine. This virtual simulated environment is augmented by the introduction of high-level haptic interfaces for robotic assistance that aim at re-directing the motion of the trainee's hands and wrists toward targets or away from obstacles, and providing a quantitative performance score after the execution of each training exercise.An experimental study shows that the introduction of enhanced robotic assistance into a surgical robotics training curriculum improves performance during the training process and, crucially, promotes the transfer of the acquired skills to an unassisted surgical scenario, like the clinical one.
Augmented Reality and Human-Robot Collaboration Framework for Percutaneous Nephrolithotomy
Jan 09, 2024



During Percutaneous Nephrolithotomy (PCNL) operations, the surgeon is required to define the incision point on the patient's back, align the needle to a pre-planned path, and perform puncture operations afterward. The procedure is currently performed manually using ultrasound or fluoroscopy imaging for needle orientation, which, however, implies limited accuracy and low reproducibility. This work incorporates Augmented Reality (AR) visualization with an optical see-through head-mounted display (OST-HMD) and Human-Robot Collaboration (HRC) framework to empower the surgeon's task completion performance. In detail, Eye-to-Hand calibration, system registration, and hologram model registration are performed to realize visual guidance. A Cartesian impedance controller is used to guide the operator during the needle puncture task execution. Experiments are conducted to verify the system performance compared with conventional manual puncture procedures and a 2D monitor-based visualisation interface. The results showed that the proposed framework achieves the lowest median and standard deviation error across all the experimental groups, respectively. Furthermore, the NASA-TLX user evaluation results indicate that the proposed framework requires the lowest workload score for task completion compared to other experimental setups. The proposed framework exhibits significant potential for clinical application in the PCNL task, as it enhances the surgeon's perception capability, facilitates collision-free needle insertion path planning, and minimises errors in task completion.