 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Least-Squares Optimization for Data-Driven Predictive Control: A Geometric Approach
Nov 12, 2025

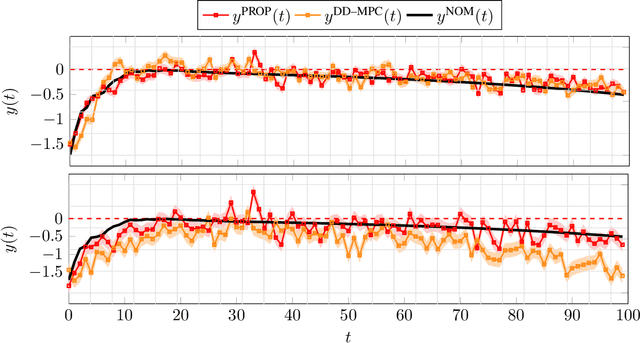

The paper studies a geometrically robust least-squares problem that extends classical and norm-based robust formulations. Rather than minimizing residual error for fixed or perturbed data, we interpret least-squares as enforcing approximate subspace inclusion between measured and true data spaces. The uncertainty in this geometric relation is modeled as a metric ball on the Grassmannian manifold, leading to a min-max problem over Euclidean and manifold variables. The inner maximization admits a closed-form solution, enabling an efficient algorithm with a transparent geometric interpretation. Applied to robust finite-horizon linear-quadratic tracking in data-enabled predictive control, the method improves upon existing robust least-squares formulations, achieving stronger robustness and favorable scaling under small uncertainty.
Urban traffic congestion control: a DeePC change
Nov 16, 2023



Urban traffic congestion remains a pressing challenge in our rapidly expanding cities, despite the abundance of available data and the efforts of policymakers. By leveraging behavioral system theory and data-driven control, this paper exploits the DeePC algorithm in the context of urban traffic control performed via dynamic traffic lights. To validate our approach, we consider a high-fidelity case study using the state-of-the-art simulation software package Simulation of Urban MObility (SUMO). Preliminary results indicate that DeePC outperforms existing approaches across various key metrics, including travel time and CO$_2$ emissions, demonstrating its potential for effective traffic management