 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlow-Based Visual Stream Compression for Event Cameras
Mar 12, 2024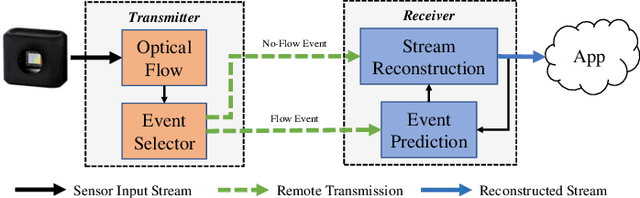

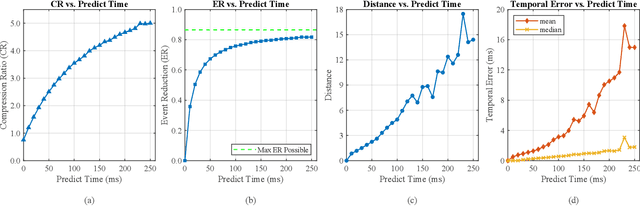
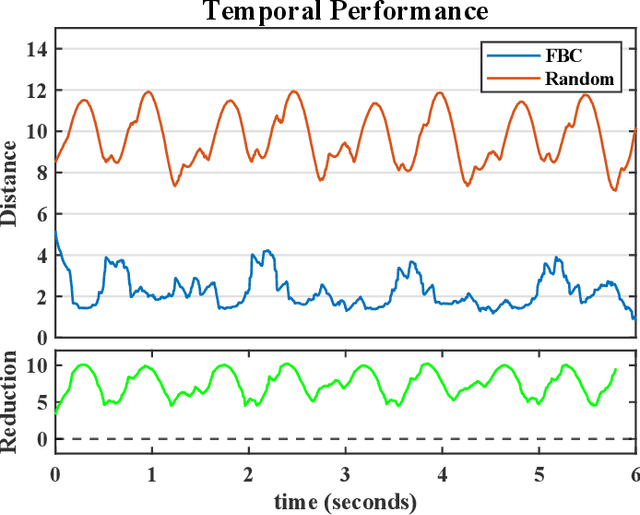
As the use of neuromorphic, event-based vision sensors expands, the need for compression of their output streams has increased. While their operational principle ensures event streams are spatially sparse, the high temporal resolution of the sensors can result in high data rates from the sensor depending on scene dynamics. For systems operating in communication-bandwidth-constrained and power-constrained environments, it is essential to compress these streams before transmitting them to a remote receiver. Therefore, we introduce a flow-based method for the real-time asynchronous compression of event streams as they are generated. This method leverages real-time optical flow estimates to predict future events without needing to transmit them, therefore, drastically reducing the amount of data transmitted. The flow-based compression introduced is evaluated using a variety of methods including spatiotemporal distance between event streams. The introduced method itself is shown to achieve an average compression ratio of 2.81 on a variety of event-camera datasets with the evaluation configuration used. That compression is achieved with a median temporal error of 0.48 ms and an average spatiotemporal event-stream distance of 3.07. When combined with LZMA compression for non-real-time applications, our method can achieve state-of-the-art average compression ratios ranging from 10.45 to 17.24. Additionally, we demonstrate that the proposed prediction algorithm is capable of performing real-time, low-latency event prediction.
hARMS: A Hardware Acceleration Architecture for Real-Time Event-Based Optical Flow
Dec 13, 2021
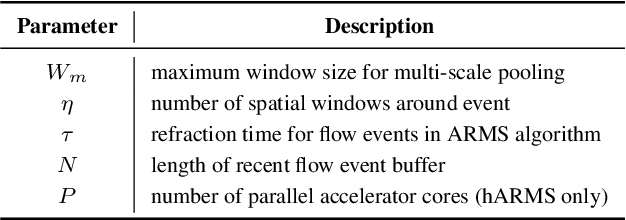
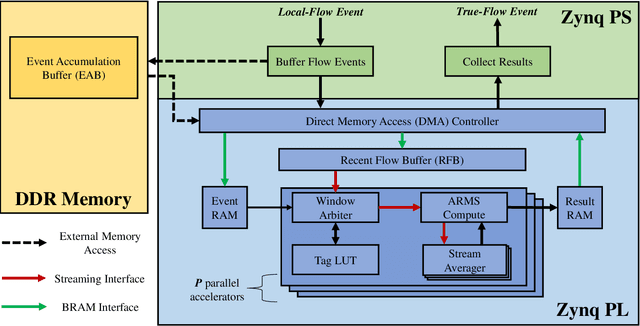
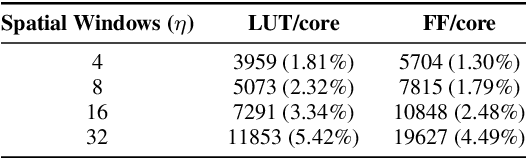
Event-based vision sensors produce asynchronous event streams with high temporal resolution based on changes in the visual scene. The properties of these sensors allow for accurate and fast calculation of optical flow as events are generated. Existing solutions for calculating optical flow from event data either fail to capture the true direction of motion due to the aperture problem, do not use the high temporal resolution of the sensor, or are too computationally expensive to be run in real time on embedded platforms. In this research, we first present a faster version of our previous algorithm, ARMS (Aperture Robust Multi-Scale flow). The new optimized software version (fARMS) significantly improves throughput on a traditional CPU. Further, we present hARMS, a hardware realization of the fARMS algorithm allowing for real-time computation of true flow on low-power, embedded platforms. The proposed hARMS architecture targets hybrid system-on-chip devices and was designed to maximize configurability and throughput. The hardware architecture and fARMS algorithm were developed with asynchronous neuromorphic processing in mind, abandoning the common use of an event frame and instead operating using only a small history of relevant events, allowing latency to scale independently of the sensor resolution. This change in processing paradigm improved the estimation of flow directions by up to 73% compared to the existing method and yielded a demonstrated hARMS throughput of up to 1.21 Mevent/s on the benchmark configuration selected. This throughput enables real-time performance and makes it the fastest known realization of aperture-robust, event-based optical flow to date.
Neutron-Induced, Single-Event Effects on Neuromorphic Event-based Vision Sensor: A First Step Towards Space Applications
Jan 29, 2021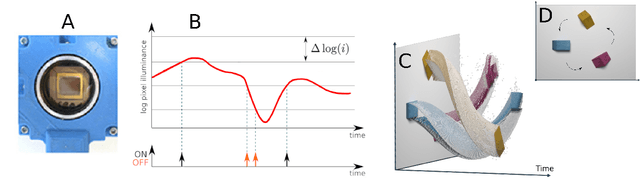
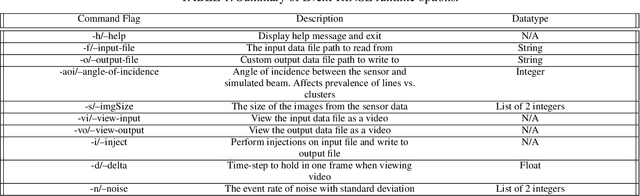
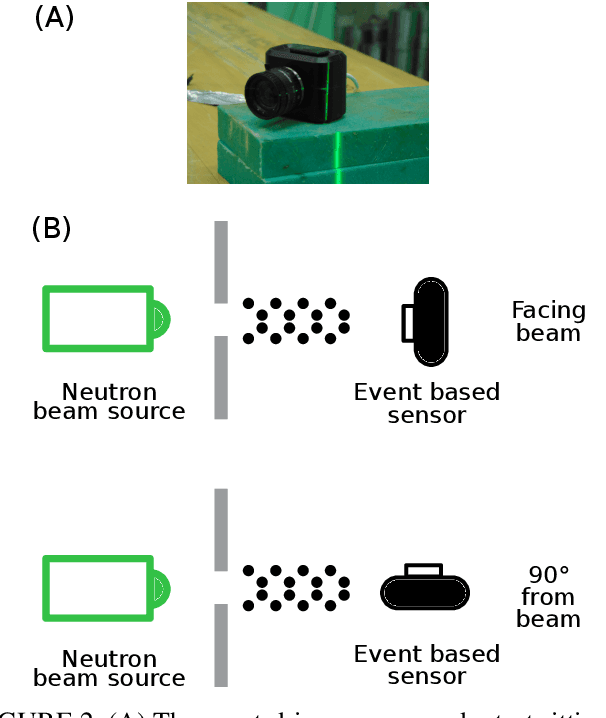
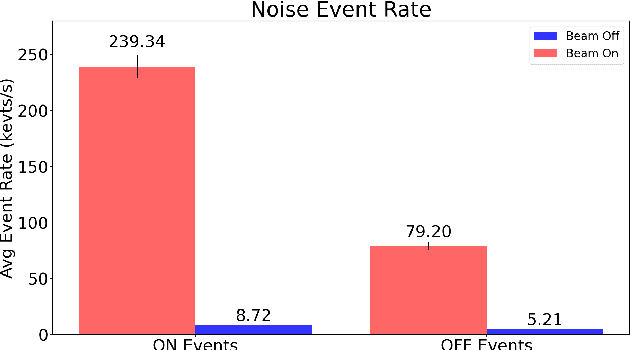
This paper studies the suitability of neuromorphic event-based vision cameras for spaceflight, and the effects of neutron radiation on their performance. Neuromorphic event-based vision cameras are novel sensors that implement asynchronous, clockless data acquisition, providing information about the change in illuminance greater than 120dB with sub-millisecond temporal precision. These sensors have huge potential for space applications as they provide an extremely sparse representation of visual dynamics while removing redundant information, thereby conforming to low-resource requirements. An event-based sensor was irradiated under wide-spectrum neutrons at Los Alamos Neutron Science Center and its effects were classified. We found that the sensor had very fast recovery during radiation, showing high correlation of noise event bursts with respect to source macro-pulses. No significant differences were observed between the number of events induced at different angles of incidence but significant differences were found in the spatial structure of noise events at different angles. The results show that event-based cameras are capable of functioning in a space-like, radiative environment with a signal-to-noise ratio of 3.355. They also show that radiation-induced noise does not affect event-level computation. We also introduce the Event-based Radiation-Induced Noise Simulation Environment (Event-RINSE), a simulation environment based on the noise-modelling we conducted and capable of injecting the effects of radiation-induced noise from the collected data to any stream of events in order to ensure that developed code can operate in a radiative environment. To the best of our knowledge, this is the first time such analysis of neutron-induced noise analysis has been performed on a neuromorphic vision sensor, and this study shows the advantage of using such sensors for space applications.