 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScope Compliance Uncertainty Estimate
Dec 17, 2023The zeitgeist of the digital era has been dominated by an expanding integration of Artificial Intelligence~(AI) in a plethora of applications across various domains. With this expansion, however, questions of the safety and reliability of these methods come have become more relevant than ever. Consequently, a run-time ML model safety system has been developed to ensure the model's operation within the intended context, especially in applications whose environments are greatly variable such as Autonomous Vehicles~(AVs). SafeML is a model-agnostic approach for performing such monitoring, using distance measures based on statistical testing of the training and operational datasets; comparing them to a predetermined threshold, returning a binary value whether the model should be trusted in the context of the observed data or be deemed unreliable. Although a systematic framework exists for this approach, its performance is hindered by: (1) a dependency on a number of design parameters that directly affect the selection of a safety threshold and therefore likely affect its robustness, (2) an inherent assumption of certain distributions for the training and operational sets, as well as (3) a high computational complexity for relatively large sets. This work addresses these limitations by changing the binary decision to a continuous metric. Furthermore, all data distribution assumptions are made obsolete by implementing non-parametric approaches, and the computational speed increased by introducing a new distance measure based on the Empirical Characteristics Functions~(ECF).
Keep your Distance: Determining Sampling and Distance Thresholds in Machine Learning Monitoring
Jul 11, 2022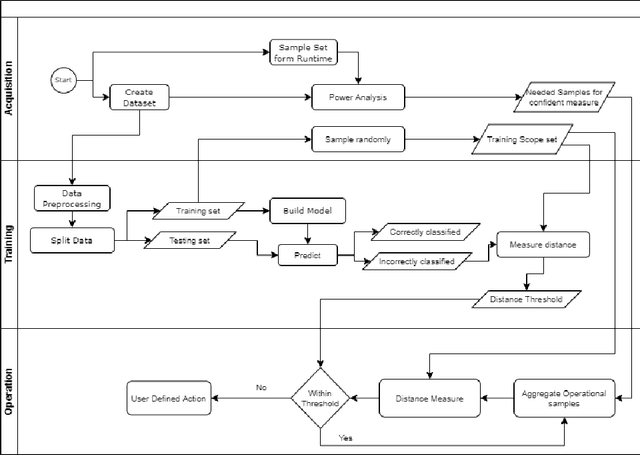

Machine Learning~(ML) has provided promising results in recent years across different applications and domains. However, in many cases, qualities such as reliability or even safety need to be ensured. To this end, one important aspect is to determine whether or not ML components are deployed in situations that are appropriate for their application scope. For components whose environments are open and variable, for instance those found in autonomous vehicles, it is therefore important to monitor their operational situation to determine its distance from the ML components' trained scope. If that distance is deemed too great, the application may choose to consider the ML component outcome unreliable and switch to alternatives, e.g. using human operator input instead. SafeML is a model-agnostic approach for performing such monitoring, using distance measures based on statistical testing of the training and operational datasets. Limitations in setting SafeML up properly include the lack of a systematic approach for determining, for a given application, how many operational samples are needed to yield reliable distance information as well as to determine an appropriate distance threshold. In this work, we address these limitations by providing a practical approach and demonstrate its use in a well known traffic sign recognition problem, and on an example using the CARLA open-source automotive simulator.