 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMovement-Specific Analysis for FIM Score Classification Using Spatio-Temporal Deep Learning
Nov 13, 2025


The functional independence measure (FIM) is widely used to evaluate patients' physical independence in activities of daily living. However, traditional FIM assessment imposes a significant burden on both patients and healthcare professionals. To address this challenge, we propose an automated FIM score estimation method that utilizes simple exercises different from the designated FIM assessment actions. Our approach employs a deep neural network architecture integrating a spatial-temporal graph convolutional network (ST-GCN), bidirectional long short-term memory (BiLSTM), and an attention mechanism to estimate FIM motor item scores. The model effectively captures long-term temporal dependencies and identifies key body-joint contributions through learned attention weights. We evaluated our method in a study of 277 rehabilitation patients, focusing on FIM transfer and locomotion items. Our approach successfully distinguishes between completely independent patients and those requiring assistance, achieving balanced accuracies of 70.09-78.79 % across different FIM items. Additionally, our analysis reveals specific movement patterns that serve as reliable predictors for particular FIM evaluation items.
VAE-Based Synthetic EMG Generation with Mix-Consistency Loss for Recognizing Unseen Motion Combinations
Nov 12, 2025Electromyogram (EMG)-based motion classification using machine learning has been widely employed in applications such as prosthesis control. While previous studies have explored generating synthetic patterns of combined motions to reduce training data requirements, these methods assume that combined motions can be represented as linear combinations of basic motions. However, this assumption often fails due to complex neuromuscular phenomena such as muscle co-contraction, resulting in low-fidelity synthetic signals and degraded classification performance. To address this limitation, we propose a novel method that learns to synthesize combined motion patterns in a structured latent space. Specifically, we employ a variational autoencoder (VAE) to encode EMG signals into a low-dimensional representation and introduce a mixconsistency loss that structures the latent space such that combined motions are embedded between their constituent basic motions. Synthetic patterns are then generated within this structured latent space and used to train classifiers for recognizing unseen combined motions. We validated our approach through upper-limb motion classification experiments with eight healthy participants. The results demonstrate that our method outperforms input-space synthesis approaches, achieving approximately 30% improvement in accuracy.
Towards Cross-Subject EMG Pattern Recognition via Dual-Branch Adversarial Feature Disentanglement
Jun 10, 2025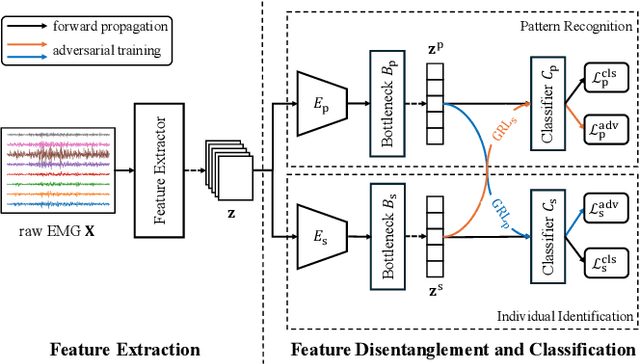



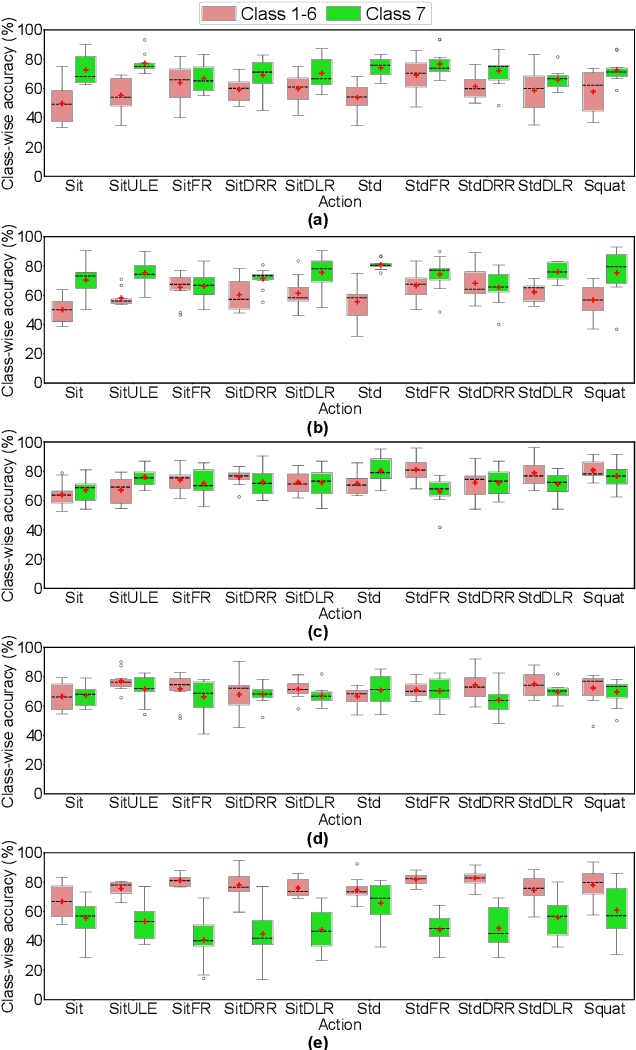
Cross-subject electromyography (EMG) pattern recognition faces significant challenges due to inter-subject variability in muscle anatomy, electrode placement, and signal characteristics. Traditional methods rely on subject-specific calibration data to adapt models to new users, an approach that is both time-consuming and impractical for large-scale, real-world deployment. This paper presents an approach to eliminate calibration requirements through feature disentanglement, enabling effective cross-subject generalization. We propose an end-to-end dual-branch adversarial neural network that simultaneously performs pattern recognition and individual identification by disentangling EMG features into pattern-specific and subject-specific components. The pattern-specific components facilitate robust pattern recognition for new users without model calibration, while the subject-specific components enable downstream applications such as task-invariant biometric identification. Experimental results demonstrate that the proposed model achieves robust performance on data from unseen users, outperforming various baseline methods in cross-subject scenarios. Overall, this study offers a new perspective for cross-subject EMG pattern recognition without model calibration and highlights the proposed model's potential for broader applications, such as task-independent biometric systems.
Inter-Subject Variance Transfer Learning for EMG Pattern Classification Based on Bayesian Inference
May 21, 2025
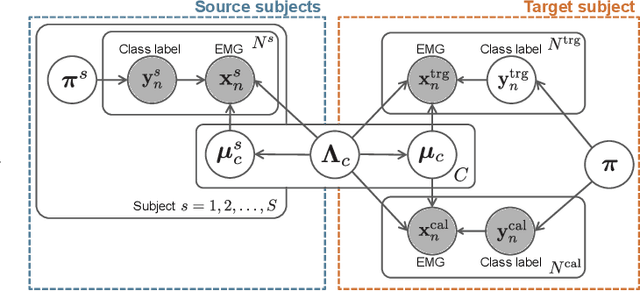


In electromyogram (EMG)-based motion recognition, a subject-specific classifier is typically trained with sufficient labeled data. However, this process demands extensive data collection over extended periods, burdening the subject. To address this, utilizing information from pre-training on multiple subjects for the training of the target subject could be beneficial. This paper proposes an inter-subject variance transfer learning method based on a Bayesian approach. This method is founded on the simple hypothesis that while the means of EMG features vary greatly across subjects, their variances may exhibit similar patterns. Our approach transfers variance information, acquired through pre-training on multiple source subjects, to a target subject within a Bayesian updating framework, thereby allowing accurate classification using limited target calibration data. A coefficient was also introduced to adjust the amount of information transferred for efficient transfer learning. Experimental evaluations using two EMG datasets demonstrated the effectiveness of our variance transfer strategy and its superiority compared to existing methods.
EEG-Based Inter-Patient Epileptic Seizure Detection Combining Domain Adversarial Training with CNN-BiLSTM Network
May 21, 2025



Automated epileptic seizure detection from electroencephalogram (EEG) remains challenging due to significant individual differences in EEG patterns across patients. While existing studies achieve high accuracy with patient-specific approaches, they face difficulties in generalizing to new patients. To address this, we propose a detection framework combining domain adversarial training with a convolutional neural network (CNN) and a bidirectional long short-term memory (BiLSTM). First, the CNN extracts local patient-invariant features through domain adversarial training, which optimizes seizure detection accuracy while minimizing patient-specific characteristics. Then, the BiLSTM captures temporal dependencies in the extracted features to model seizure evolution patterns. Evaluation using EEG recordings from 20 patients with focal epilepsy demonstrated superior performance over non-adversarial methods, achieving high detection accuracy across different patients. The integration of adversarial training with temporal modeling enables robust cross-patient seizure detection.
Recognition of Unseen Combined Motions via Convex Combination-based EMG Pattern Synthesis for Myoelectric Control
May 21, 2025



Electromyogram (EMG) signals recorded from the skin surface enable intuitive control of assistive devices such as prosthetic limbs. However, in EMG-based motion recognition, collecting comprehensive training data for all target motions remains challenging, particularly for complex combined motions. This paper proposes a method to efficiently recognize combined motions using synthetic EMG data generated through convex combinations of basic motion patterns. Instead of measuring all possible combined motions, the proposed method utilizes measured basic motion data along with synthetically combined motion data for training. This approach expands the range of recognizable combined motions while minimizing the required training data collection. We evaluated the effectiveness of the proposed method through an upper limb motion classification experiment with eight subjects. The experimental results demonstrated that the proposed method improved the classification accuracy for unseen combined motions by approximately 17%.
Classification of Carotid Plaque with Jellyfish Sign Through Convolutional and Recurrent Neural Networks Utilizing Plaque Surface Edges
Jun 27, 2024
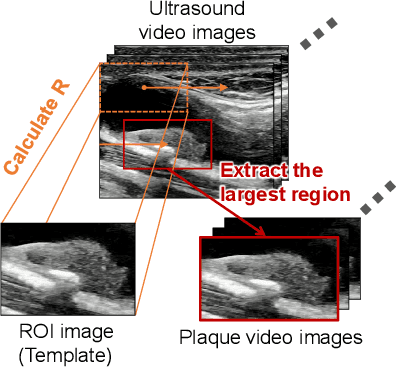


In carotid arteries, plaque can develop as localized elevated lesions. The Jellyfish sign, marked by fluctuating plaque surfaces with blood flow pulsation, is a dynamic characteristic of these plaques that has recently attracted attention. Detecting this sign is vital, as it is often associated with cerebral infarction. This paper proposes an ultrasound video-based classification method for the Jellyfish sign, using deep neural networks. The proposed method first preprocesses carotid ultrasound videos to separate the movement of the vascular wall from plaque movements. These preprocessed videos are then combined with plaque surface information and fed into a deep learning model comprising convolutional and recurrent neural networks, enabling the efficient classification of the Jellyfish sign. The proposed method was verified using ultrasound video images from 200 patients. Ablation studies demonstrated the effectiveness of each component of the proposed method.
Bayesian Approach for Adaptive EMG Pattern Classification Via Semi-Supervised Sequential Learning
Sep 30, 2023Intuitive human-machine interfaces may be developed using pattern classification to estimate executed human motions from electromyogram (EMG) signals generated during muscle contraction. The continual use of EMG-based interfaces gradually alters signal characteristics owing to electrode shift and muscle fatigue, leading to a gradual decline in classification accuracy. This paper proposes a Bayesian approach for adaptive EMG pattern classification using semi-supervised sequential learning. The proposed method uses a Bayesian classification model based on Gaussian distributions to predict the motion class and estimate its confidence. Pseudo-labels are subsequently assigned to data with high-prediction confidence, and the posterior distributions of the model are sequentially updated within the framework of Bayesian updating, thereby achieving adaptive motion recognition to alterations in signal characteristics over time. Experimental results on six healthy adults demonstrated that the proposed method can suppress the degradation of classification accuracy over time and outperforms conventional methods. These findings demonstrate the validity of the proposed approach and its applicability to practical EMG-based control systems.
Evaluating Classifier Confidence for Surface EMG Pattern Recognition
Apr 12, 2023Surface electromyogram (EMG) can be employed as an interface signal for various devices and software via pattern recognition. In EMG-based pattern recognition, the classifier should not only be accurate, but also output an appropriate confidence (i.e., probability of correctness) for its prediction. If the confidence accurately reflects the likelihood of true correctness, then it will be useful in various application tasks, such as motion rejection and online adaptation. The aim of this paper is to identify the types of classifiers that provide higher accuracy and better confidence in EMG pattern recognition. We evaluate the performance of various discriminative and generative classifiers on four EMG datasets, both visually and quantitatively. The analysis results show that while a discriminative classifier based on a deep neural network exhibits high accuracy, it outputs a confidence that differs from true probabilities. By contrast, a scale mixture model-based classifier, which is a generative classifier that can account for uncertainty in EMG variance, exhibits superior performance in terms of both accuracy and confidence.
Automated Classification of General Movements in Infants Using a Two-stream Spatiotemporal Fusion Network
Jul 04, 2022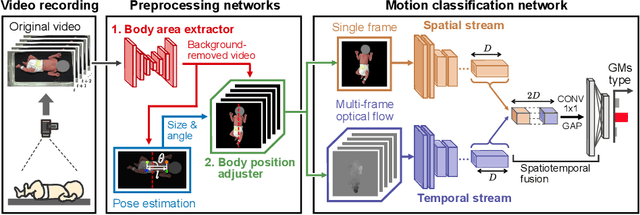
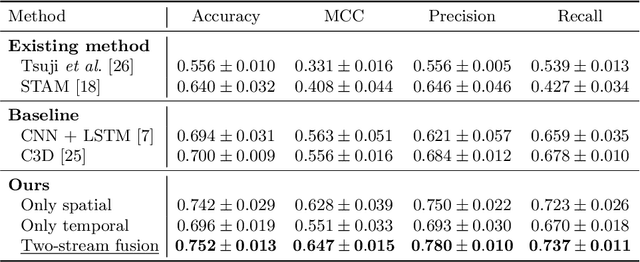
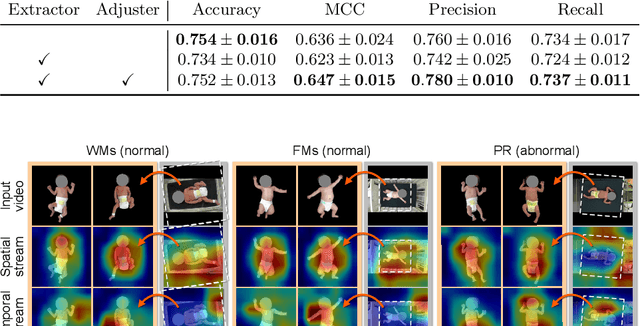
The assessment of general movements (GMs) in infants is a useful tool in the early diagnosis of neurodevelopmental disorders. However, its evaluation in clinical practice relies on visual inspection by experts, and an automated solution is eagerly awaited. Recently, video-based GMs classification has attracted attention, but this approach would be strongly affected by irrelevant information, such as background clutter in the video. Furthermore, for reliability, it is necessary to properly extract the spatiotemporal features of infants during GMs. In this study, we propose an automated GMs classification method, which consists of preprocessing networks that remove unnecessary background information from GMs videos and adjust the infant's body position, and a subsequent motion classification network based on a two-stream structure. The proposed method can efficiently extract the essential spatiotemporal features for GMs classification while preventing overfitting to irrelevant information for different recording environments. We validated the proposed method using videos obtained from 100 infants. The experimental results demonstrate that the proposed method outperforms several baseline models and the existing methods.