 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResource Allocation and Service Provisioning in Multi-Agent Cloud Robotics: A Comprehensive Survey
Apr 29, 2021



Robotic applications nowadays are widely adopted to enhance operational automation and performance of real-world Cyber-Physical Systems (CPSs) including Industry 4.0, agriculture, healthcare, and disaster management. These applications are composed of latency-sensitive, data-heavy, and compute-intensive tasks. The robots, however, are constrained in the computational power and storage capacity. The concept of multi-agent cloud robotics enables robot-to-robot cooperation and creates a complementary environment for the robots in executing large-scale applications with the capability to utilize the edge and cloud resources. However, in such a collaborative environment, the optimal resource allocation for robotic tasks is challenging to achieve. Heterogeneous energy consumption rates and application of execution costs associated with the robots and computing instances make it even more complex. In addition, the data transmission delay between local robots, edge nodes, and cloud data centres adversely affects the real-time interactions and impedes service performance guarantee. Taking all these issues into account, this paper comprehensively surveys the state-of-the-art on resource allocation and service provisioning in multi-agent cloud robotics. The paper presents the application domains of multi-agent cloud robotics through explicit comparison with the contemporary computing paradigms and identifies the specific research challenges. A complete taxonomy on resource allocation is presented for the first time, together with the discussion of resource pooling, computation offloading, and task scheduling for efficient service provisioning. Furthermore, we highlight the research gaps from the learned lessons, and present future directions deemed beneficial to further advance this emerging field.
Application of Machine Learning Techniques in Aquaculture
May 03, 2014In this paper we present applications of different machine learning algorithms in aquaculture. Machine learning algorithms learn models from historical data. In aquaculture historical data are obtained from farm practices, yields, and environmental data sources. Associations between these different variables can be obtained by applying machine learning algorithms to historical data. In this paper we present applications of different machine learning algorithms in aquaculture applications.
* 2 pages
Ensemble Classifiers and Their Applications: A Review
Apr 15, 2014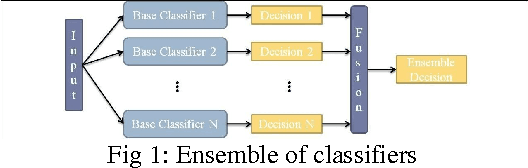
Ensemble classifier refers to a group of individual classifiers that are cooperatively trained on data set in a supervised classification problem. In this paper we present a review of commonly used ensemble classifiers in the literature. Some ensemble classifiers are also developed targeting specific applications. We also present some application driven ensemble classifiers in this paper.
* Published with International Journal of Computer Trends and Technology (IJCTT)
Block Motion Based Dynamic Texture Analysis: A Review
Mar 24, 2014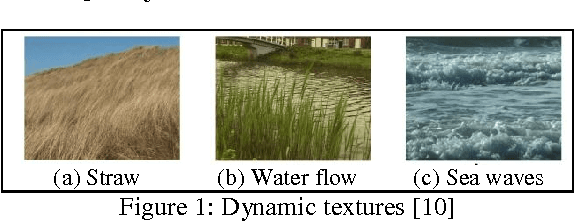
Dynamic texture refers to image sequences of non-rigid objects that exhibit some regularity in their movement. Videos of smoke, fire etc. fall under the category of dynamic texture. Researchers have investigated different ways to analyze dynamic textures since early nineties. Both appearance based (image intensities) and motion based approaches are investigated. Motion based approaches turn out to be more effective. A group of researchers have investigated ways to utilize the motion vectors readily available with the blocks in video codes like MGEG/H26X. In this paper we provide a review of the dynamic texture analysis methods using block motion. Research into dynamic texture analysis using block motion includes recognition, motion computation, segmentation, and synthesis. We provide a comprehensive review of these approaches.
* Published with International Journal of Computer Trends and Technology (IJCTT)