 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTeslaMirror: Multistimulus Encounter-Type Haptic Display for Shape and Texture Rendering in VR
Jul 05, 2020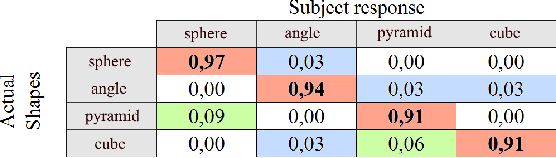
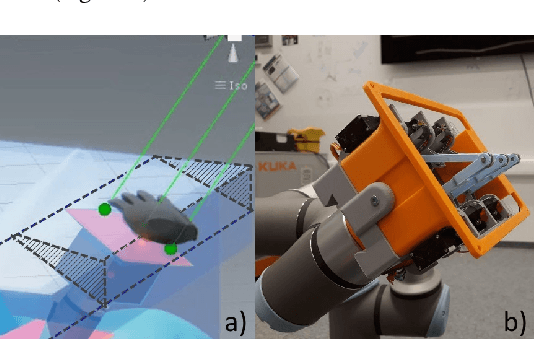
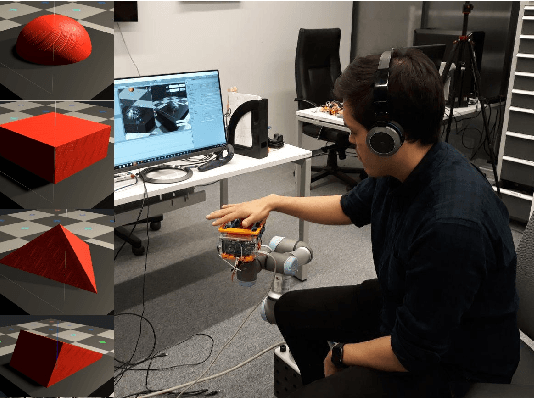
This paper proposes a novel concept of a hybrid tactile display with multistimulus feedback, allowing the real-time experience of the position, shape, and texture of the virtual object. The key technology of the TeslaMirror is that we can deliver the sensation of object parameters (pressure, vibration, and electrotactile feedback) without any wearable haptic devices. We developed the full digital twin of the 6 DOF UR robot in the virtual reality (VR) environment, allowing the adaptive surface simulation and control of the hybrid display in real-time. The preliminary user study was conducted to evaluate the ability of TeslaMirror to reproduce shape sensations with the under-actuated end-effector. The results revealed that potentially this approach can be used in the virtual systems for rendering versatile VR shapes with high fidelity haptic experience.
SwarmTouch: Guiding a Swarm of Micro-Quadrotors with Impedance Control using a Wearable Tactile Interface
Sep 05, 2019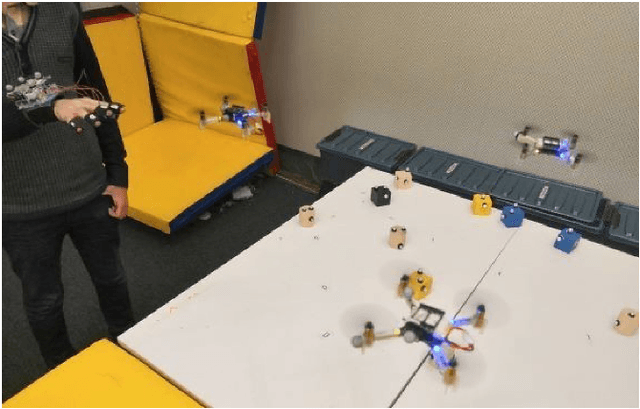
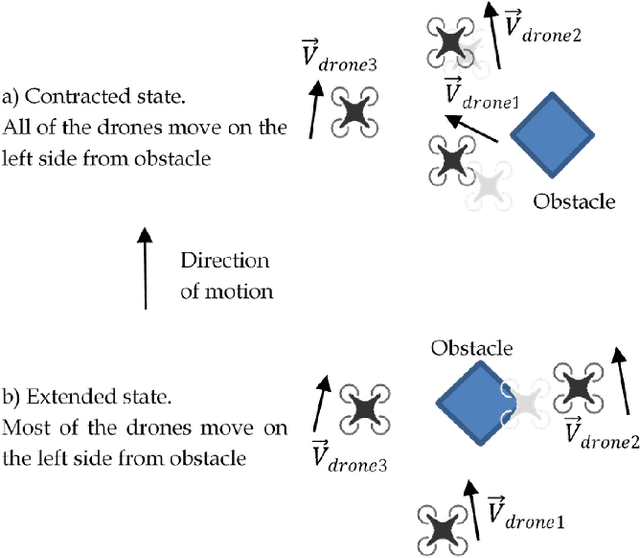
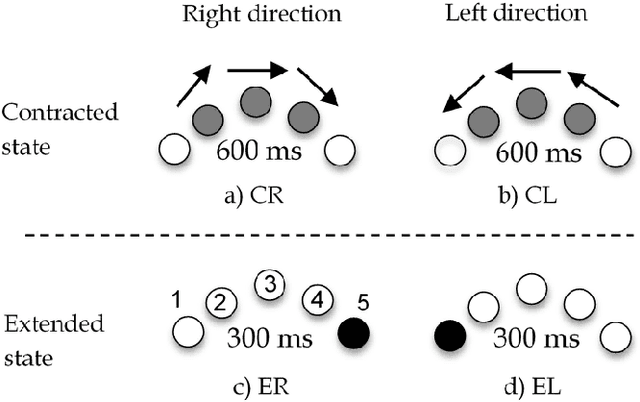
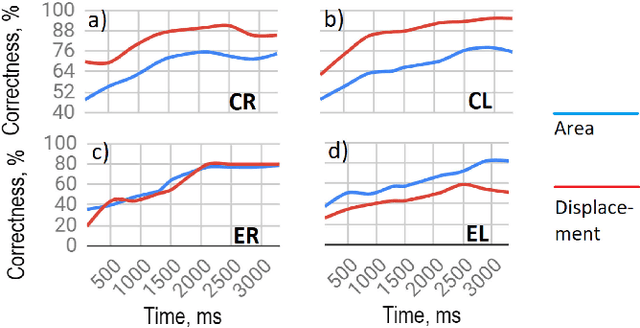
To achieve a smooth and safe guiding of a drone formation by a human operator, we propose a novel interaction strategy for a human-swarm communication which combines impedance control and vibrotactile feedback. The presented approach takes into account the human hand velocity and changes the formation shape and dynamics accordingly using impedance interlinks simulated between quadrotors, which helps to achieve a natural swarm behavior. Several tactile patterns representing static and dynamic parameters of the swarm are proposed. The user feels the state of the swarm at the fingertips and receives valuable information to improve the controllability of the complex formation. A user study revealed the patterns with high recognition rates. A flight experiment demonstrated the possibility to accurately navigate the formation in a cluttered environment using only tactile feedback. Subjects stated that tactile sensation allows guiding the drone formation through obstacles and makes the human-swarm communication more interactive. The proposed technology can potentially have a strong impact on the human-swarm interaction, providing a higher level of awareness during the swarm navigation.
* \c{opyright} 20XX IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works
SwarmTouch: Tactile Interaction of Human with Impedance Controlled Swarm of Nano-Quadrotors
Sep 05, 2019



We propose a novel interaction strategy for a human-swarm communication when a human operator guides a formation of quadrotors with impedance control and receives vibrotactile feedback. The presented approach takes into account the human hand velocity and changes the formation shape and dynamics accordingly using impedance interlinks simulated between quadrotors, which helps to achieve a life-like swarm behavior. Experimental results with Crazyflie 2.0 quadrotor platform validate the proposed control algorithm. The tactile patterns representing dynamics of the swarm (extension or contraction) are proposed. The user feels the state of the swarm at his fingertips and receives valuable information to improve the controllability of the complex life-like formation. The user study revealed the patterns with high recognition rates. Subjects stated that tactile sensation improves the ability to guide the drone formation and makes the human-swarm communication much more interactive. The proposed technology can potentially have a strong impact on the human-swarm interaction, providing a new level of intuitiveness and immersion into the swarm navigation.
* \c{opyright} 2018 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works. arXiv admin note: substantial text overlap with arXiv:1909.02298