 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGPD: Guided Polynomial Diffusion for Motion Planning
Jan 30, 2025



Diffusion-based motion planners are becoming popular due to their well-established performance improvements, stemming from sample diversity and the ease of incorporating new constraints directly during inference. However, a primary limitation of the diffusion process is the requirement for a substantial number of denoising steps, especially when the denoising process is coupled with gradient-based guidance. In this paper, we introduce, diffusion in the parametric space of trajectories, where the parameters are represented as Bernstein coefficients. We show that this representation greatly improves the effectiveness of the cost function guidance and the inference speed. We also introduce a novel stitching algorithm that leverages the diversity in diffusion-generated trajectories to produce collision-free trajectories with just a single cost function-guided model. We demonstrate that our approaches outperform current SOTA diffusion-based motion planners for manipulators and provide an ablation study on key components.
EDMP: Ensemble-of-costs-guided Diffusion for Motion Planning
Sep 20, 2023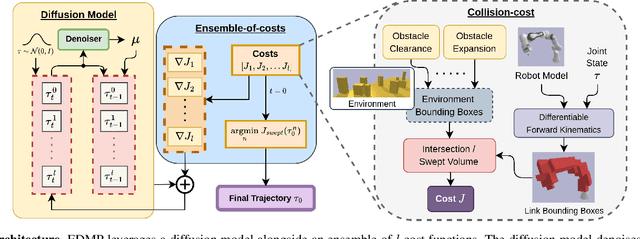
Classical motion planning for robotic manipulation includes a set of general algorithms that aim to minimize a scene-specific cost of executing a given plan. This approach offers remarkable adaptability, as they can be directly used off-the-shelf for any new scene without needing specific training datasets. However, without a prior understanding of what diverse valid trajectories are and without specially designed cost functions for a given scene, the overall solutions tend to have low success rates. While deep-learning-based algorithms tremendously improve success rates, they are much harder to adopt without specialized training datasets. We propose EDMP, an Ensemble-of-costs-guided Diffusion for Motion Planning that aims to combine the strengths of classical and deep-learning-based motion planning. Our diffusion-based network is trained on a set of diverse kinematically valid trajectories. Like classical planning, for any new scene at the time of inference, we compute scene-specific costs such as "collision cost" and guide the diffusion to generate valid trajectories that satisfy the scene-specific constraints. Further, instead of a single cost function that may be insufficient in capturing diversity across scenes, we use an ensemble of costs to guide the diffusion process, significantly improving the success rate compared to classical planners. EDMP performs comparably with SOTA deep-learning-based methods while retaining the generalization capabilities primarily associated with classical planners.