 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGHOST: Fast Category-agnostic Hand-Object Interaction Reconstruction from RGB Videos using Gaussian Splatting
Mar 19, 2026Understanding realistic hand-object interactions from monocular RGB videos is essential for AR/VR, robotics, and embodied AI. Existing methods rely on category-specific templates or heavy computation, yet still produce physically inconsistent hand-object alignment in 3D. We introduce GHOST (Gaussian Hand-Object Splatting), a fast, category-agnostic framework for reconstructing dynamic hand-object interactions using 2D Gaussian Splatting. GHOST represents both hands and objects as dense, view-consistent Gaussian discs and introduces three key innovations: (1) a geometric-prior retrieval and consistency loss that completes occluded object regions, (2) a grasp-aware alignment that refines hand translations and object scale to ensure realistic contact, and (3) a hand-aware background loss that prevents penalizing hand-occluded object regions. GHOST achieves complete, physically consistent, and animatable reconstructions from a single RGB video while running an order of magnitude faster than prior category-agnostic methods. Extensive experiments on ARCTIC, HO3D, and in-the-wild datasets demonstrate state-of-the-art accuracy in 3D reconstruction and 2D rendering quality, establishing GHOST as an efficient and robust solution for realistic hand-object interaction modeling. Code is available at https://github.com/ATAboukhadra/GHOST.
Fast-HaMeR: Boosting Hand Mesh Reconstruction using Knowledge Distillation
Mar 17, 2026Fast and accurate 3D hand reconstruction is essential for real-time applications in VR/AR, human-computer interaction, robotics, and healthcare. Most state-of-the-art methods rely on heavy models, limiting their use on resource-constrained devices like headsets, smartphones, and embedded systems. In this paper, we investigate how the use of lightweight neural networks, combined with Knowledge Distillation, can accelerate complex 3D hand reconstruction models by making them faster and lighter, while maintaining comparable reconstruction accuracy. While our approach is suited for various hand reconstruction frameworks, we focus primarily on boosting the HaMeR model, currently the leading method in terms of reconstruction accuracy. We replace its original ViT-H backbone with lighter alternatives, including MobileNet, MobileViT, ConvNeXt, and ResNet, and evaluate three knowledge distillation strategies: output-level, feature-level, and a hybrid of both. Our experiments show that using lightweight backbones that are only 35% the size of the original achieves 1.5x faster inference speed while preserving similar performance quality with only a minimal accuracy difference of 0.4mm. More specifically, we show how output-level distillation notably improves student performance, while feature-level distillation proves more effective for higher-capacity students. Overall, the findings pave the way for efficient real-world applications on low-power devices. The code and models are publicly available under https://github.com/hunainahmedj/Fast-HaMeR.
SurgeoNet: Realtime 3D Pose Estimation of Articulated Surgical Instruments from Stereo Images using a Synthetically-trained Network
Oct 02, 2024



Surgery monitoring in Mixed Reality (MR) environments has recently received substantial focus due to its importance in image-based decisions, skill assessment, and robot-assisted surgery. Tracking hands and articulated surgical instruments is crucial for the success of these applications. Due to the lack of annotated datasets and the complexity of the task, only a few works have addressed this problem. In this work, we present SurgeoNet, a real-time neural network pipeline to accurately detect and track surgical instruments from a stereo VR view. Our multi-stage approach is inspired by state-of-the-art neural-network architectural design, like YOLO and Transformers. We demonstrate the generalization capabilities of SurgeoNet in challenging real-world scenarios, achieved solely through training on synthetic data. The approach can be easily extended to any new set of articulated surgical instruments. SurgeoNet's code and data are publicly available.
ShapeGraFormer: GraFormer-Based Network for Hand-Object Reconstruction from a Single Depth Map
Oct 18, 2023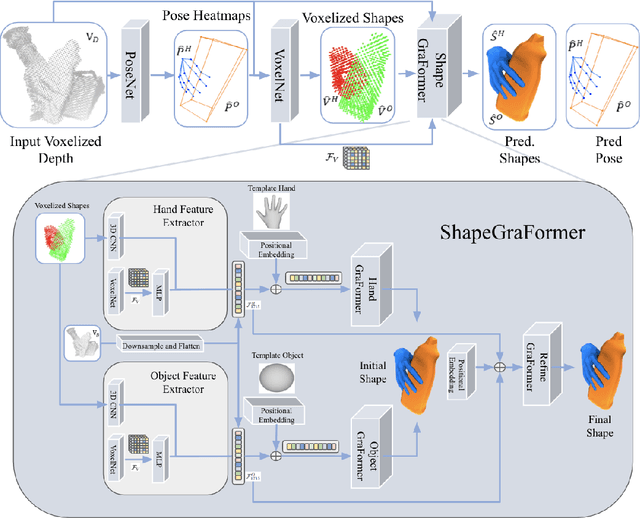


3D reconstruction of hand-object manipulations is important for emulating human actions. Most methods dealing with challenging object manipulation scenarios, focus on hands reconstruction in isolation, ignoring physical and kinematic constraints due to object contact. Some approaches produce more realistic results by jointly reconstructing 3D hand-object interactions. However, they focus on coarse pose estimation or rely upon known hand and object shapes. We propose the first approach for realistic 3D hand-object shape and pose reconstruction from a single depth map. Unlike previous work, our voxel-based reconstruction network regresses the vertex coordinates of a hand and an object and reconstructs more realistic interaction. Our pipeline additionally predicts voxelized hand-object shapes, having a one-to-one mapping to the input voxelized depth. Thereafter, we exploit the graph nature of the hand and object shapes, by utilizing the recent GraFormer network with positional embedding to reconstruct shapes from template meshes. In addition, we show the impact of adding another GraFormer component that refines the reconstructed shapes based on the hand-object interactions and its ability to reconstruct more accurate object shapes. We perform an extensive evaluation on the HO-3D and DexYCB datasets and show that our method outperforms existing approaches in hand reconstruction and produces plausible reconstructions for the objects
THOR-Net: End-to-end Graformer-based Realistic Two Hands and Object Reconstruction with Self-supervision
Oct 25, 2022



Realistic reconstruction of two hands interacting with objects is a new and challenging problem that is essential for building personalized Virtual and Augmented Reality environments. Graph Convolutional networks (GCNs) allow for the preservation of the topologies of hands poses and shapes by modeling them as a graph. In this work, we propose the THOR-Net which combines the power of GCNs, Transformer, and self-supervision to realistically reconstruct two hands and an object from a single RGB image. Our network comprises two stages; namely the features extraction stage and the reconstruction stage. In the features extraction stage, a Keypoint RCNN is used to extract 2D poses, features maps, heatmaps, and bounding boxes from a monocular RGB image. Thereafter, this 2D information is modeled as two graphs and passed to the two branches of the reconstruction stage. The shape reconstruction branch estimates meshes of two hands and an object using our novel coarse-to-fine GraFormer shape network. The 3D poses of the hands and objects are reconstructed by the other branch using a GraFormer network. Finally, a self-supervised photometric loss is used to directly regress the realistic textured of each vertex in the hands' meshes. Our approach achieves State-of-the-art results in Hand shape estimation on the HO-3D dataset (10.0mm) exceeding ArtiBoost (10.8mm). It also surpasses other methods in hand pose estimation on the challenging two hands and object (H2O) dataset by 5mm on the left-hand pose and 1 mm on the right-hand pose.