 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThermal Object Detection using Domain Adaptation through Style Consistency
Jun 01, 2020

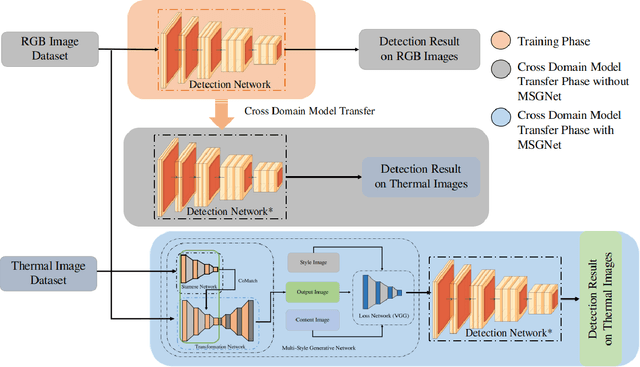
A recent fatal accident of an autonomous vehicle opens a debate about the use of infrared technology in the sensor suite for autonomous driving to increase visibility for robust object detection. Thermal imaging has an advantage over lidar, radar, and camera because it can detect the heat difference emitted by objects in the infrared spectrum. In contrast, lidar and camera capture in the visible spectrum, and adverse weather conditions can impact their accuracy. The limitations of object detection in images from conventional imaging sensors can be catered to by thermal images. This paper presents a domain adaptation method for object detection in thermal images. We explore multiple ideas of domain adaption. First, a generative adversarial network is used to transfer the low-level features from the visible spectrum to the infrared spectrum domain through style consistency. Second, a cross-domain model with style consistency is used for object detection in the infrared spectrum by transferring the trained visible spectrum model. The proposed strategies are evaluated on publicly available thermal image datasets (FLIR ADAS and KAIST Multi-Spectral). We find that adapting the low-level features from the source domain to the target domain through domain adaptation increases in mean average precision by approximately 10%.