 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePathSpace: Rapid continuous map approximation for efficient SLAM using B-Splines in constrained environments
Mar 03, 2026Simultaneous Localization and Mapping (SLAM) plays a crucial role in enabling autonomous vehicles to navigate previously unknown environments. Semantic SLAM mostly extends visual SLAM, leveraging the higher density information available to reason about the environment in a more human-like manner. This allows for better decision making by exploiting prior structural knowledge of the environment, usually in the form of labels. Current semantic SLAM techniques still mostly rely on a dense geometric representation of the environment, limiting their ability to apply constraints based on context. We propose PathSpace, a novel semantic SLAM framework that uses continuous B-splines to represent the environment in a compact manner, while also maintaining and reasoning through the continuous probability density functions required for probabilistic reasoning. This system applies the multiple strengths of B-splines in the context of SLAM to interpolate and fit otherwise discrete sparse environments. We test this framework in the context of autonomous racing, where we exploit pre-specified track characteristics to produce significantly reduced representations at comparable levels of accuracy to traditional landmark based methods and demonstrate its potential in limiting the resources used by a system with minimal accuracy loss.
A Scenario-Based Functional Testing Approach to Improving DNN Performance
Jul 13, 2023This paper proposes a scenario-based functional testing approach for enhancing the performance of machine learning (ML) applications. The proposed method is an iterative process that starts with testing the ML model on various scenarios to identify areas of weakness. It follows by a further testing on the suspected weak scenarios and statistically evaluate the model's performance on the scenarios to confirm the diagnosis. Once the diagnosis of weak scenarios is confirmed by test results, the treatment of the model is performed by retraining the model using a transfer learning technique with the original model as the base and applying a set of training data specifically targeting the treated scenarios plus a subset of training data selected at random from the original train dataset to prevent the so-call catastrophic forgetting effect. Finally, after the treatment, the model is assessed and evaluated again by testing on the treated scenarios as well as other scenarios to check if the treatment is effective and no side effect caused. The paper reports a case study with a real ML deep neural network (DNN) model, which is the perception system of an autonomous racing car. It is demonstrated that the method is effective in the sense that DNN model's performance can be improved. It provides an efficient method of enhancing ML model's performance with much less human and compute resource than retrain from scratch.
YOLO-Z: Improving small object detection in YOLOv5 for autonomous vehicles
Dec 23, 2021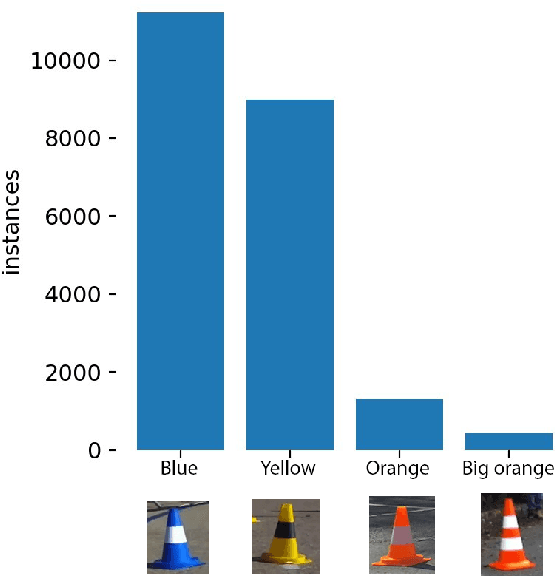


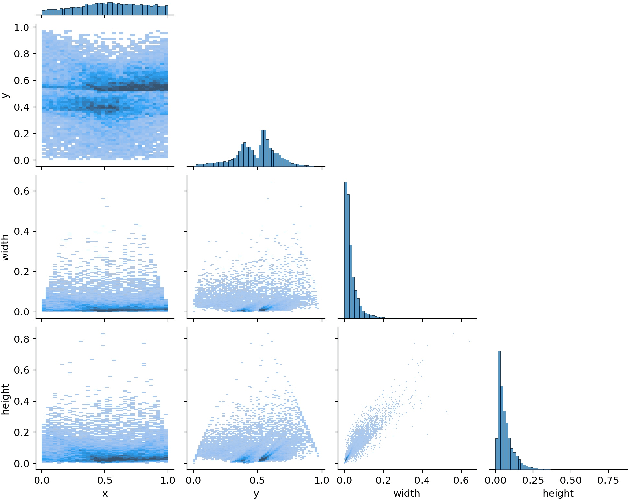
As autonomous vehicles and autonomous racing rise in popularity, so does the need for faster and more accurate detectors. While our naked eyes are able to extract contextual information almost instantly, even from far away, image resolution and computational resources limitations make detecting smaller objects (that is, objects that occupy a small pixel area in the input image) a genuinely challenging task for machines and a wide-open research field. This study explores how the popular YOLOv5 object detector can be modified to improve its performance in detecting smaller objects, with a particular application in autonomous racing. To achieve this, we investigate how replacing certain structural elements of the model (as well as their connections and other parameters) can affect performance and inference time. In doing so, we propose a series of models at different scales, which we name `YOLO-Z', and which display an improvement of up to 6.9% in mAP when detecting smaller objects at 50% IOU, at the cost of just a 3ms increase in inference time compared to the original YOLOv5. Our objective is to inform future research on the potential of adjusting a popular detector such as YOLOv5 to address specific tasks and provide insights on how specific changes can impact small object detection. Such findings, applied to the broader context of autonomous vehicles, could increase the amount of contextual information available to such systems.