 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBlind as a bat: audible echolocation on small robots
Jan 19, 2023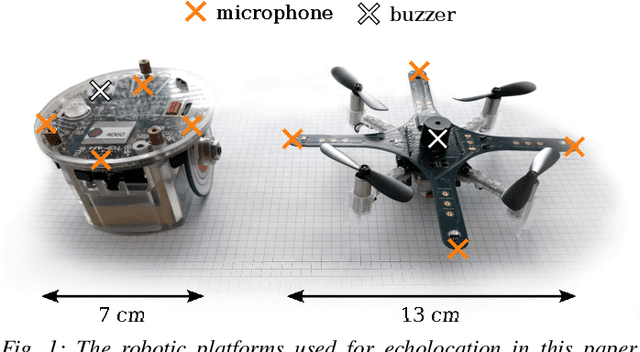
For safe and efficient operation, mobile robots need to perceive their environment, and in particular, perform tasks such as obstacle detection, localization, and mapping. Although robots are often equipped with microphones and speakers, the audio modality is rarely used for these tasks. Compared to the localization of sound sources, for which many practical solutions exist, algorithms for active echolocation are less developed and often rely on hardware requirements that are out of reach for small robots. We propose an end-to-end pipeline for sound-based localization and mapping that is targeted at, but not limited to, robots equipped with only simple buzzers and low-end microphones. The method is model-based, runs in real time, and requires no prior calibration or training. We successfully test the algorithm on the e-puck robot with its integrated audio hardware, and on the Crazyflie drone, for which we design a reproducible audio extension deck. We achieve centimeter-level wall localization on both platforms when the robots are static during the measurement process. Even in the more challenging setting of a flying drone, we can successfully localize walls, which we demonstrate in a proof-of-concept multi-wall localization and mapping demo.