 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBelieving in BERT: Using expressive communication to enhance trust and counteract operational error in physical Human-Robot Interaction
Jun 22, 2016
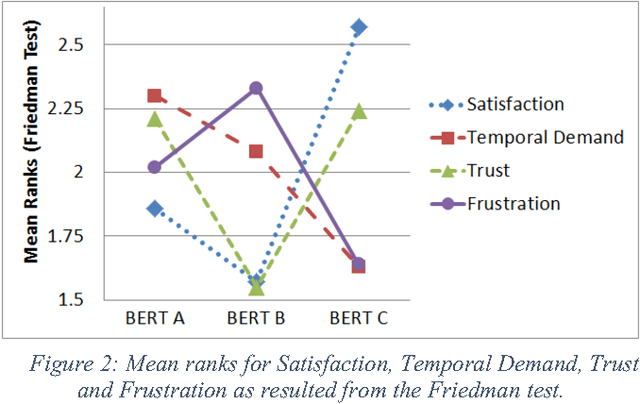
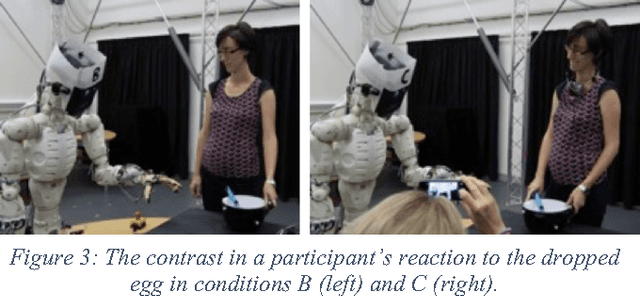

Strategies are necessary to mitigate the impact of unexpected behavior in collaborative robotics, and research to develop solutions is lacking. Our aim here was to explore the benefits of an affective interaction, as opposed to a more efficient, less error prone but non-communicative one. The experiment took the form of an omelet-making task, with a wide range of participants interacting directly with BERT2, a humanoid robot assistant. Having significant implications for design, results suggest that efficiency is not the most important aspect of performance for users; a personable, expressive robot was found to be preferable over a more efficient one, despite a considerable trade off in time taken to perform the task. Our findings also suggest that a robot exhibiting human-like characteristics may make users reluctant to 'hurt its feelings'; they may even lie in order to avoid this.