 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe AI Mechanic: Acoustic Vehicle Characterization Neural Networks
May 19, 2022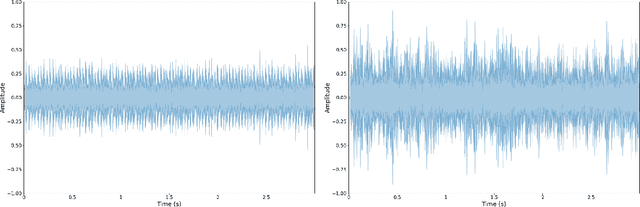
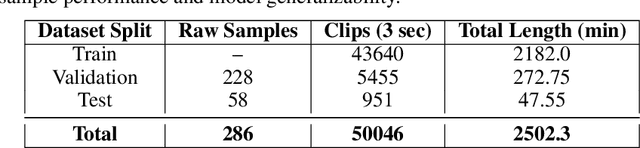
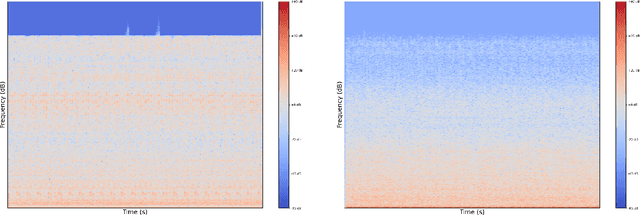
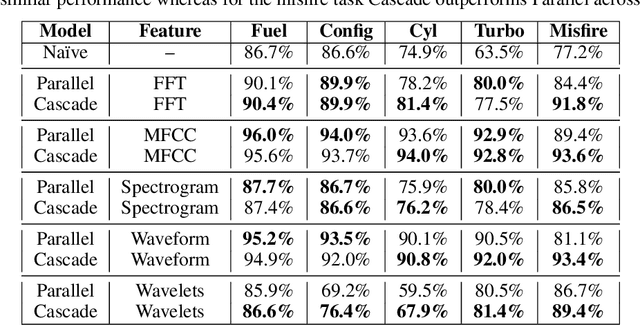
In a world increasingly dependent on road-based transportation, it is essential to understand vehicles. We introduce the AI mechanic, an acoustic vehicle characterization deep learning system, as an integrated approach using sound captured from mobile devices to enhance transparency and understanding of vehicles and their condition for non-expert users. We develop and implement novel cascading architectures for vehicle understanding, which we define as sequential, conditional, multi-level networks that process raw audio to extract highly-granular insights. To showcase the viability of cascading architectures, we build a multi-task convolutional neural network that predicts and cascades vehicle attributes to enhance fault detection. We train and test these models on a synthesized dataset reflecting more than 40 hours of augmented audio and achieve >92% validation set accuracy on attributes (fuel type, engine configuration, cylinder count and aspiration type). Our cascading architecture additionally achieved 93.6% validation and 86.8% test set accuracy on misfire fault prediction, demonstrating margins of 16.4% / 7.8% and 4.2% / 1.5% improvement over na\"ive and parallel baselines. We explore experimental studies focused on acoustic features, data augmentation, feature fusion, and data reliability. Finally, we conclude with a discussion of broader implications, future directions, and application areas for this work.
Recurrent Flow-Guided Semantic Forecasting
Sep 21, 2018

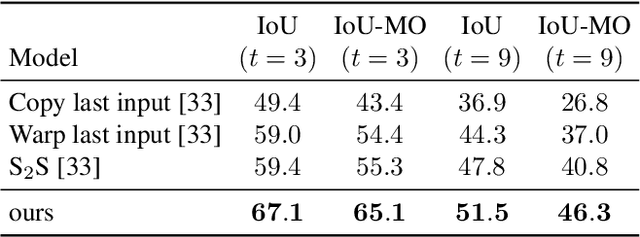

Understanding the world around us and making decisions about the future is a critical component to human intelligence. As autonomous systems continue to develop, their ability to reason about the future will be the key to their success. Semantic anticipation is a relatively under-explored area for which autonomous vehicles could take advantage of (e.g., forecasting pedestrian trajectories). Motivated by the need for real-time prediction in autonomous systems, we propose to decompose the challenging semantic forecasting task into two subtasks: current frame segmentation and future optical flow prediction. Through this decomposition, we built an efficient, effective, low overhead model with three main components: flow prediction network, feature-flow aggregation LSTM, and end-to-end learnable warp layer. Our proposed method achieves state-of-the-art accuracy on short-term and moving objects semantic forecasting while simultaneously reducing model parameters by up to 95% and increasing efficiency by greater than 40x.