 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGalvanic Body-Coupled Powering for Wireless Implanted Neurostimulators
Dec 04, 2024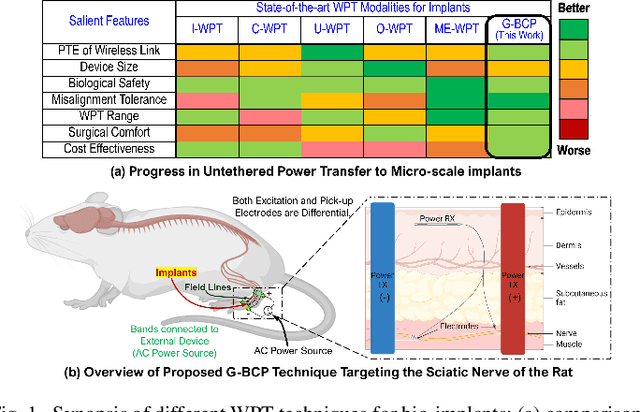
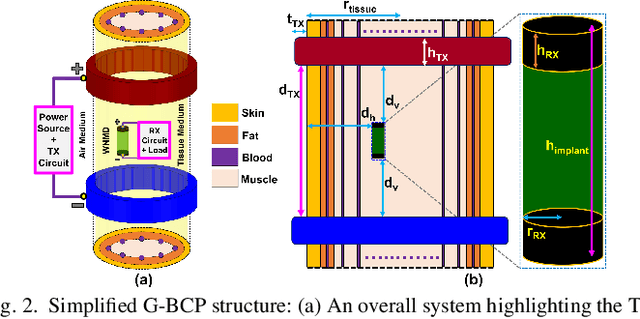
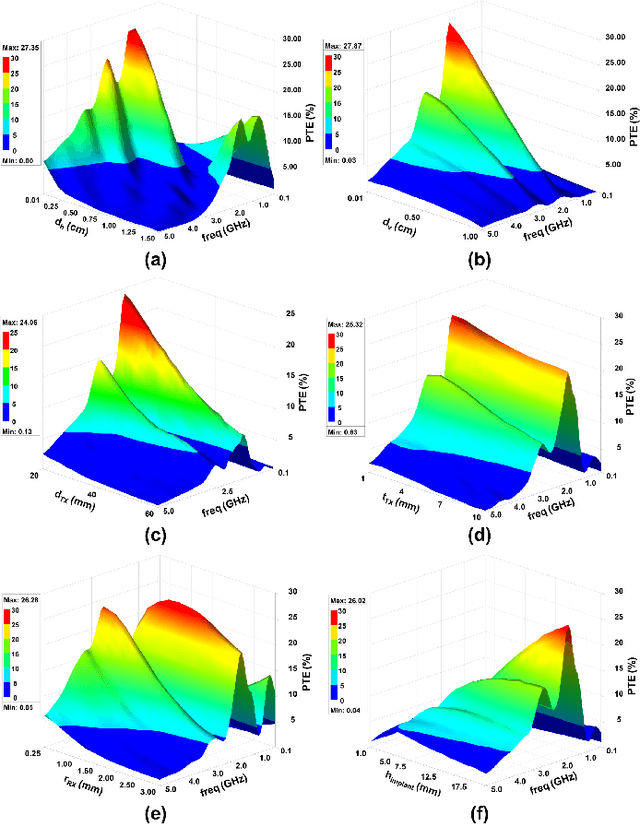
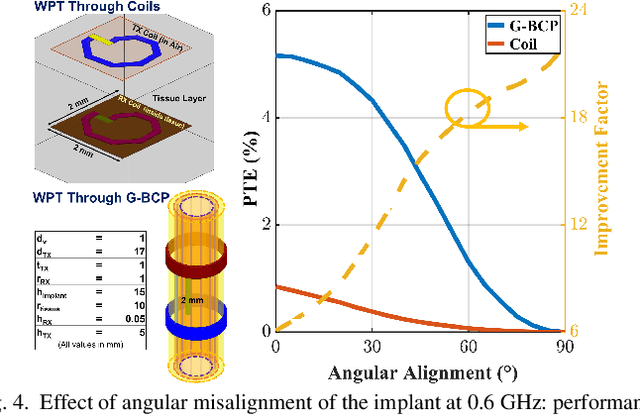
Body-coupled powering (BCP) is an innovative wireless power transfer (WPT) technique, recently explored for its potential to deliver power to cutting-edge biomedical implants such as nerve and muscle stimulators. This paper demonstrates the efficient technique of designing WPT systems embedding BCP via galvanic coupling (G-BCP). The G-BCP configuration utilizes two metal circular rings surrounding the body area of interest as the transmitter (TX) electrodes required for galvanic (differential) excitation and a wireless implant as the receiver (RX) equipped with two electrodes for differential power reception accordingly. By focusing on the unique advantages of this approach - such as enhanced targeting accuracy, improved power transfer efficiency (PTE), and favorable tissue penetration characteristics, G-BCP emerges as a superior alternative to traditional WPT methods. A comprehensive analysis is conducted to obtain the optimized device parameters while simultaneously allowing flexible placement of implants at different depths and alignments. To substantiate the proposed design concept, a prototype was simulated in Ansys HFSS, employing a multi-layered tissue medium of 10mm radius and targeting the sciatic nerve of a rat. Impressively, this prototype achieves > 20% PTE at 1.25 GHz, with the implant (radius of RX electrodes = 1 mm) located 2 mm deep inside the tissue model having complex load impedance of Rload = 1000 Ohm and Cload = 5pF. Therefore, the G-BCP-based wirelessly powered microdevices are envisaged to be a key enabler in neural recording and stimulation, specifically for the peripheral nervous system, enhancing therapeutic outcomes and patient experiences.
BlueME: Robust Underwater Robot-to-Robot Communication Using Compact Magnetoelectric Antennas
Nov 14, 2024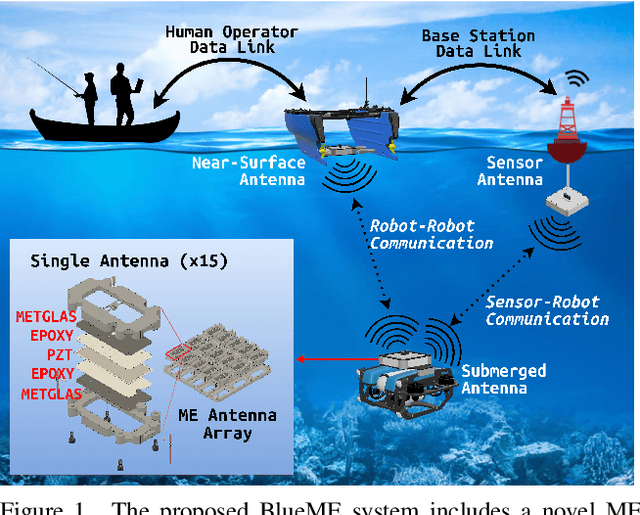
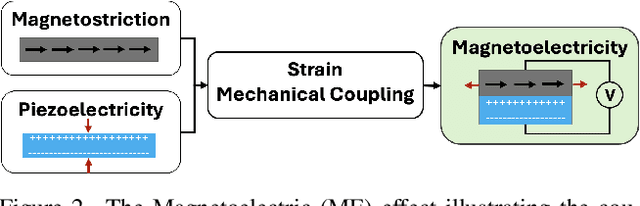
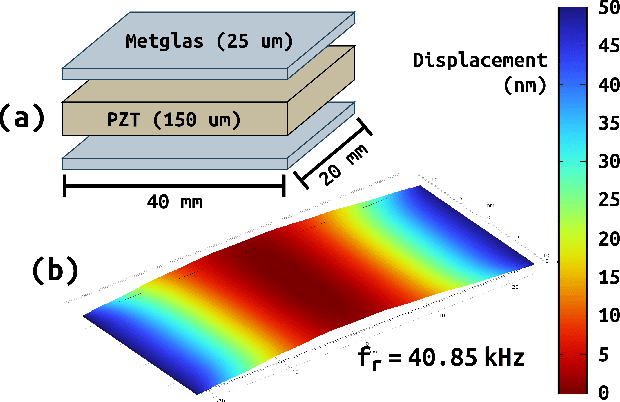
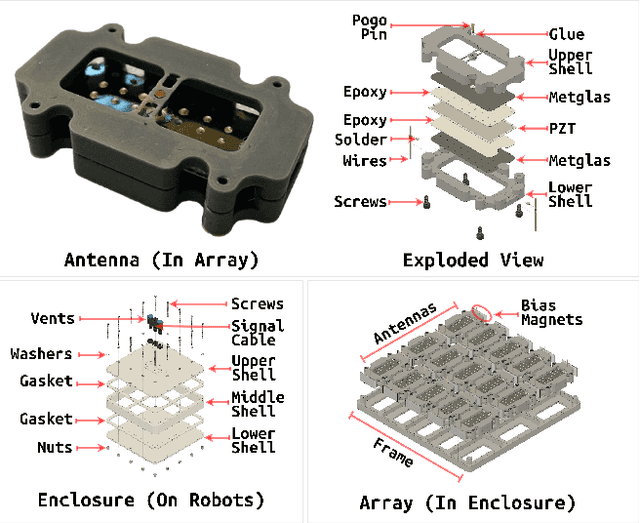
We present the design, development, and experimental validation of BlueME, a compact magnetoelectric (ME) antenna array system for underwater robot-to-robot communication. BlueME employs ME antennas operating at their natural mechanical resonance frequency to efficiently transmit and receive very-low-frequency (VLF) electromagnetic signals underwater. To evaluate its performance, we deployed BlueME on an autonomous surface vehicle (ASV) and a remotely operated vehicle (ROV) in open-water field trials. Our tests demonstrate that BlueME maintains reliable signal transmission at distances beyond 200 meters while consuming only 1 watt of power. Field trials show that the system operates effectively in challenging underwater conditions such as turbidity, obstacles, and multipath interference -- that generally affect acoustics and optics. Our analysis also examines the impact of complete submersion on system performance and identifies key deployment considerations. This work represents the first practical underwater deployment of ME antennas outside the laboratory and implements the largest VLF ME array system to date. BlueME demonstrates significant potential for marine robotics and automation in multi-robot cooperative systems and remote sensor networks.