 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Simple Strategy to Provable Invariance via Orbit Mapping
Sep 24, 2022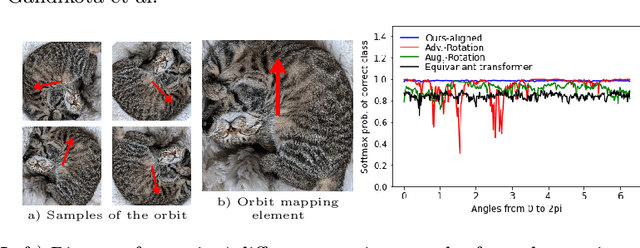
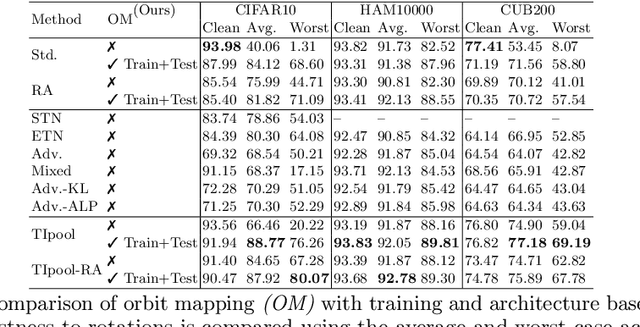
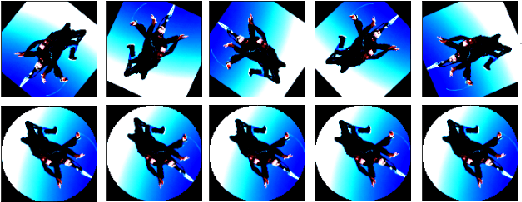
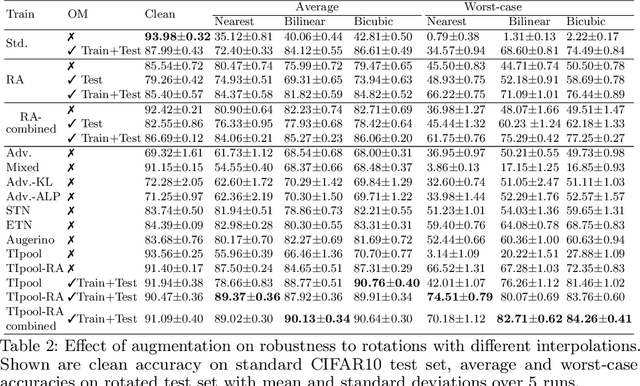
Many applications require robustness, or ideally invariance, of neural networks to certain transformations of input data. Most commonly, this requirement is addressed by training data augmentation, using adversarial training, or defining network architectures that include the desired invariance by design. In this work, we propose a method to make network architectures provably invariant with respect to group actions by choosing one element from a (possibly continuous) orbit based on a fixed criterion. In a nutshell, we intend to 'undo' any possible transformation before feeding the data into the actual network. Further, we empirically analyze the properties of different approaches which incorporate invariance via training or architecture, and demonstrate the advantages of our method in terms of robustness and computational efficiency. In particular, we investigate the robustness with respect to rotations of images (which can hold up to discretization artifacts) as well as the provable orientation and scaling invariance of 3D point cloud classification.
Training or Architecture? How to Incorporate Invariance in Neural Networks
Jun 18, 2021


Many applications require the robustness, or ideally the invariance, of a neural network to certain transformations of input data. Most commonly, this requirement is addressed by either augmenting the training data, using adversarial training, or defining network architectures that include the desired invariance automatically. Unfortunately, the latter often relies on the ability to enlist all possible transformations, which make such approaches largely infeasible for infinite sets of transformations, such as arbitrary rotations or scaling. In this work, we propose a method for provably invariant network architectures with respect to group actions by choosing one element from a (possibly continuous) orbit based on a fixed criterion. In a nutshell, we intend to 'undo' any possible transformation before feeding the data into the actual network. We analyze properties of such approaches, extend them to equivariant networks, and demonstrate their advantages in terms of robustness as well as computational efficiency in several numerical examples. In particular, we investigate the robustness with respect to rotations of images (which can possibly hold up to discretization artifacts only) as well as the provable rotational and scaling invariance of 3D point cloud classification.