 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Localization of Key Fob Using Channel Impulse Response of Ultra Wide Band Sensors for Keyless Entry Systems
Jan 16, 2024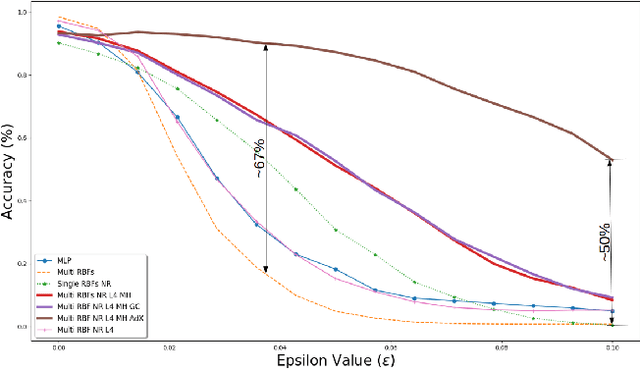
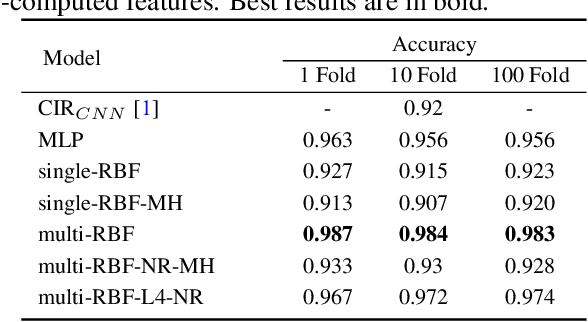
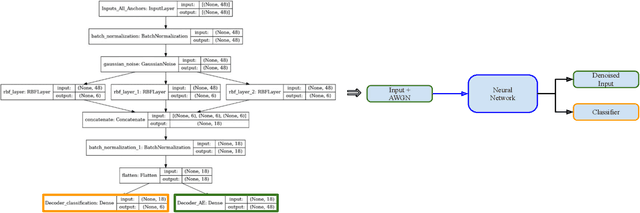
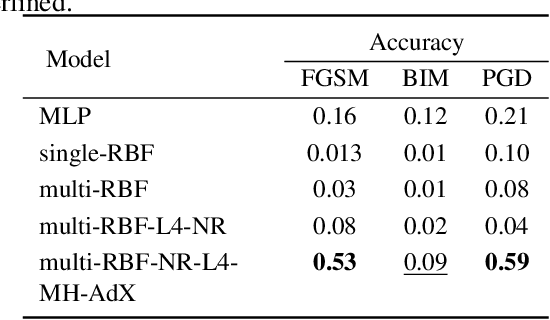
Using neural networks for localization of key fob within and surrounding a car as a security feature for keyless entry is fast emerging. In this paper we study: 1) the performance of pre-computed features of neural networks based UWB (ultra wide band) localization classification forming the baseline of our experiments. 2) Investigate the inherent robustness of various neural networks; therefore, we include the study of robustness of the adversarial examples without any adversarial training in this work. 3) Propose a multi-head self-supervised neural network architecture which outperforms the baseline neural networks without any adversarial training. The model's performance improved by 67% at certain ranges of adversarial magnitude for fast gradient sign method and 37% each for basic iterative method and projected gradient descent method.
Test-time adversarial detection and robustness for localizing humans using ultra wide band channel impulse responses
Nov 10, 2022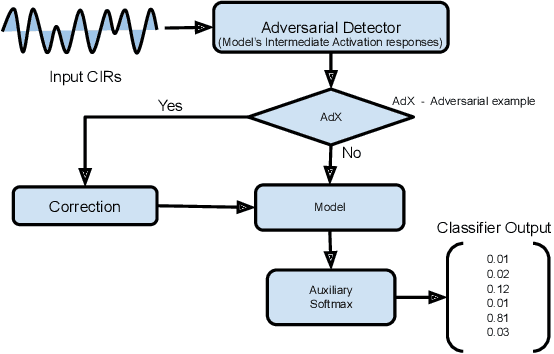
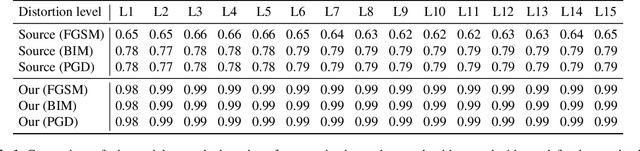
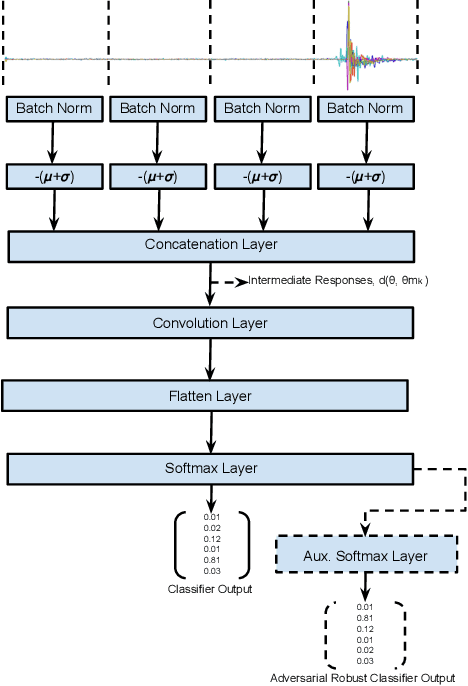
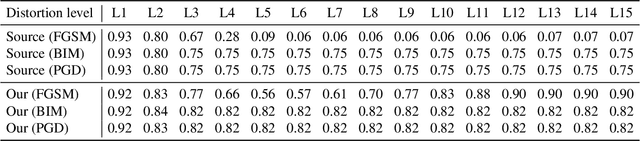
Keyless entry systems in cars are adopting neural networks for localizing its operators. Using test-time adversarial defences equip such systems with the ability to defend against adversarial attacks without prior training on adversarial samples. We propose a test-time adversarial example detector which detects the input adversarial example through quantifying the localized intermediate responses of a pre-trained neural network and confidence scores of an auxiliary softmax layer. Furthermore, in order to make the network robust, we extenuate the non-relevant features by non-iterative input sample clipping. Using our approach, mean performance over 15 levels of adversarial perturbations is increased by 55.33% for the fast gradient sign method (FGSM) and 6.3% for both the basic iterative method (BIM) and the projected gradient method (PGD).