 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Failure Prevention Skills for Safe Robot Manipulation
May 04, 2023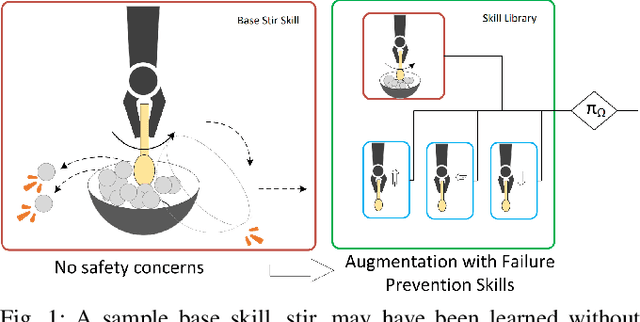

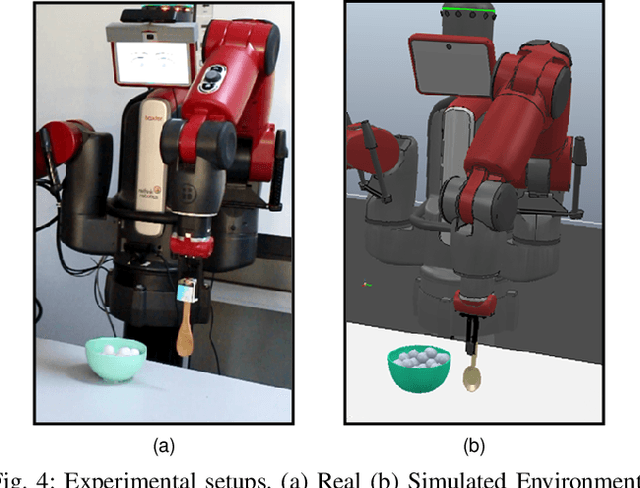
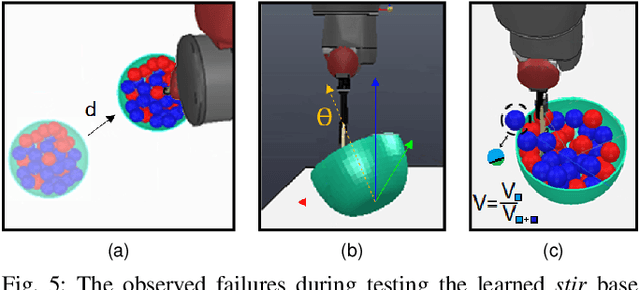
Robots are more capable of achieving manipulation tasks for everyday activities than before. But the safety of manipulation skills that robots employ is still an open problem. Considering all possible failures during skill learning increases the complexity of the process and restrains learning an optimal policy. Beyond that, in unstructured environments, it is not easy to enumerate all possible failures beforehand. In the context of safe skill manipulation, we reformulate skills as base and failure prevention skills where base skills aim at completing tasks and failure prevention skills focus on reducing the risk of failures to occur. Then, we propose a modular and hierarchical method for safe robot manipulation by augmenting base skills by learning failure prevention skills with reinforcement learning, forming a skill library to address different safety risks. Furthermore, a skill selection policy that considers estimated risks is used for the robot to select the best control policy for safe manipulation. Our experiments show that the proposed method achieves the given goal while ensuring safety by preventing failures. We also show that with the proposed method, skill learning is feasible, novel failures are easily adaptable, and our safe manipulation tools can be transferred to the real environment.
FINO-Net: A Deep Multimodal Sensor Fusion Framework for Manipulation Failure Detection
Nov 11, 2020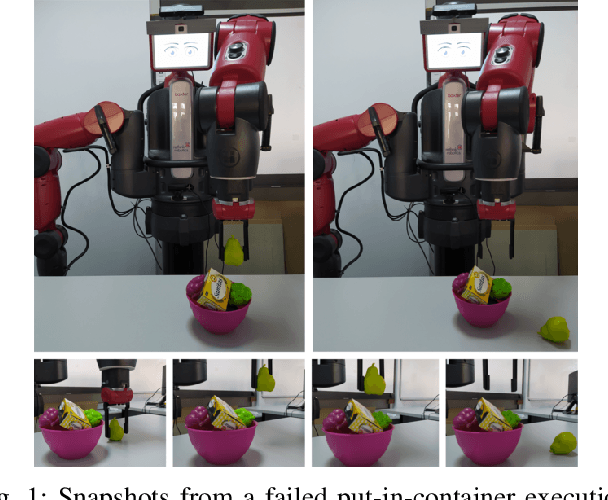
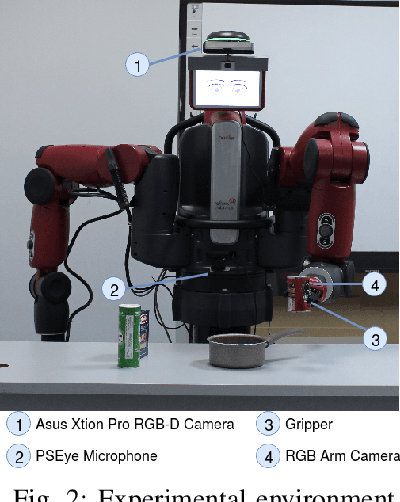
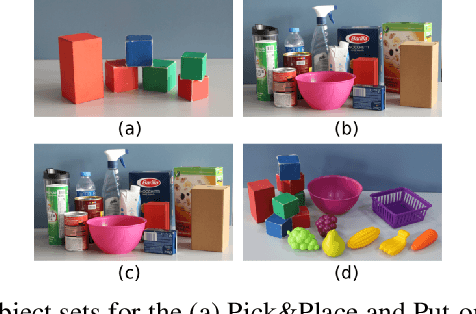
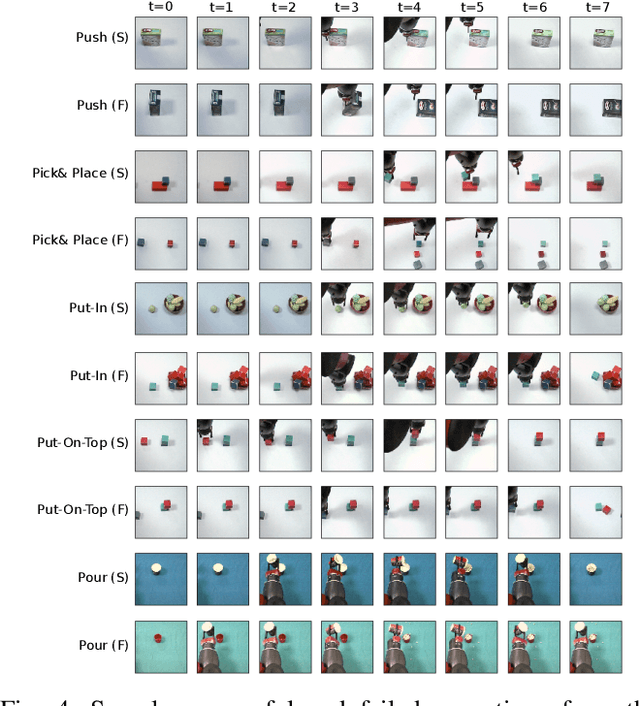
Safe manipulation in unstructured environments for service robots is a challenging problem. A failure detection system is needed to monitor and detect unintended outcomes. We propose FINO-Net, a novel multimodal sensor fusion based deep neural network to detect and identify manipulation failures. We also introduce a multimodal dataset, containing 229 real-world manipulation data recorded with a Baxter robot. Our network combines RGB, depth and audio readings to effectively detect and classify failures. Results indicate that fusing RGB with depth and audio modalities significantly improves the performance. FINO-Net achieves 98.60% detection and 87.31% classification accuracy on our novel dataset. Code and data are publicly available at https://github.com/ardai/fino-net.