Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-free Visual Control for Continuum Robot Manipulators via Orientation Adaptation
Sep 01, 2019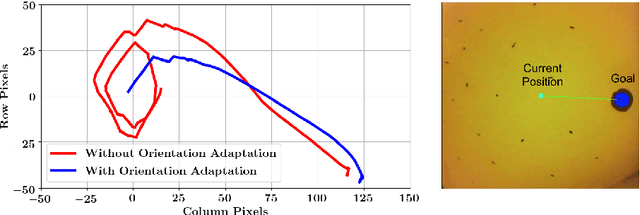
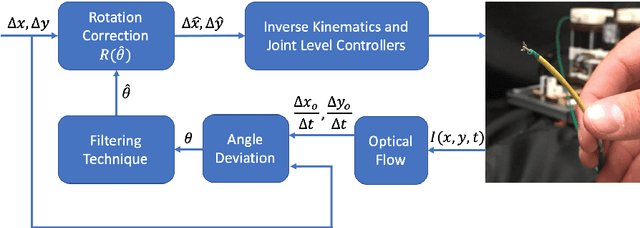
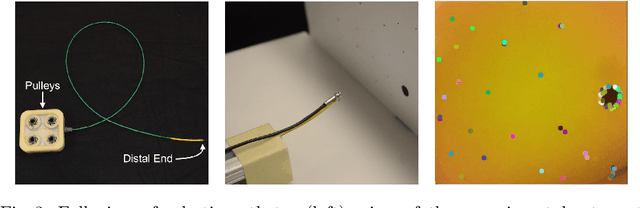
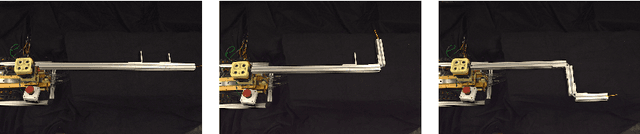
We present an orientation adaptive controller to compensate for the effects of highly constrained environments on continuum manipulator actuation. A transformation matrix updated using optimal estimation techniques from optical flow measurements captured by the distal camera is composed with any Jacobian estimation or kinematic model to compensate for these effects. By utilizing domain knowledge to define the structure of this matrix, fewer parameters need to be estimated and a stable controller can be guaranteed. The algorithm is tested on a custom robotic catheter and convergence is shown both empirically and theoretically.
* 12 pages, 5 figures, Accepted to The International Symposium on
Robotics Research 2019
Via