 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh-resolution LIDAR-based Depth Mapping using Bilateral Filter
Jun 17, 2016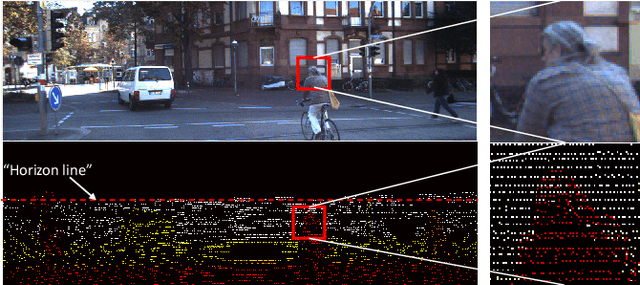
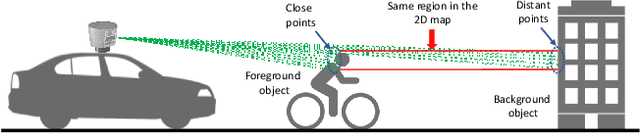

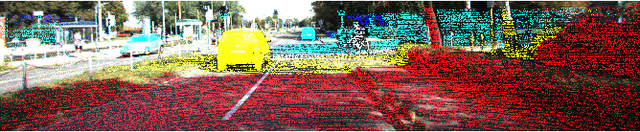
High resolution depth-maps, obtained by upsampling sparse range data from a 3D-LIDAR, find applications in many fields ranging from sensory perception to semantic segmentation and object detection. Upsampling is often based on combining data from a monocular camera to compensate the low-resolution of a LIDAR. This paper, on the other hand, introduces a novel framework to obtain dense depth-map solely from a single LIDAR point cloud; which is a research direction that has been barely explored. The formulation behind the proposed depth-mapping process relies on local spatial interpolation, using sliding-window (mask) technique, and on the Bilateral Filter (BF) where the variable of interest, the distance from the sensor, is considered in the interpolation problem. In particular, the BF is conveniently modified to perform depth-map upsampling such that the edges (foreground-background discontinuities) are better preserved by means of a proposed method which influences the range-based weighting term. Other methods for spatial upsampling are discussed, evaluated and compared in terms of different error measures. This paper also researches the role of the mask's size in the performance of the implemented methods. Quantitative and qualitative results from experiments on the KITTI Database, using LIDAR point clouds only, show very satisfactory performance of the approach introduced in this work.