 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWeighted Conformal LiDAR-Mapping for Structured SLAM
Feb 03, 2024


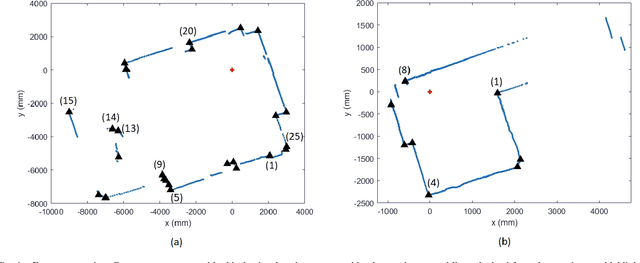
One of the main challenges in simultaneous localization and mapping (SLAM) is real-time processing. High-computational loads linked to data acquisition and processing complicate this task. This article presents an efficient feature extraction approach for mapping structured environments. The proposed methodology, weighted conformal LiDAR-mapping (WCLM), is based on the extraction of polygonal profiles and propagation of uncertainties from raw measurement data. This is achieved using conformal M bius transformation. The algorithm has been validated experimentally using 2-D data obtained from a low-cost Light Detection and Ranging (LiDAR) range finder. The results obtained suggest that computational efficiency is significantly improved with reference to other state-of-the-art SLAM approaches.