 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeZero-shot Transferable and Persistently Feasible Safe Control for High Dimensional Systems by Consistent Abstraction
Paper and Code
Mar 17, 2023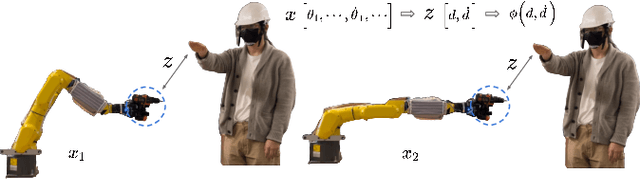
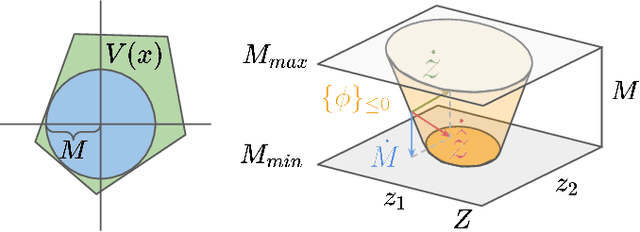
Safety is critical in robotic tasks. Energy function based methods have been introduced to address the problem. To ensure safety in the presence of control limits, we need to design an energy function that results in persistently feasible safe control at all system states. However, designing such an energy function for high-dimensional nonlinear systems remains challenging. Considering the fact that there are redundant dynamics in high dimensional systems with respect to the safety specifications, this paper proposes a novel approach called abstract safe control. We propose a system abstraction method that enables the design of energy functions on a low-dimensional model. Then we can synthesize the energy function with respect to the low-dimensional model to ensure persistent feasibility. The resulting safe controller can be directly transferred to other systems with the same abstraction, e.g., when a robot arm holds different tools. The proposed approach is demonstrated on a 7-DoF robot arm (14 states) both in simulation and real-world. Our method always finds feasible control and achieves zero safety violations in 500 trials on 5 different systems.