 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWrapyfi: A Wrapper for Message-Oriented and Robotics Middleware
Paper and Code
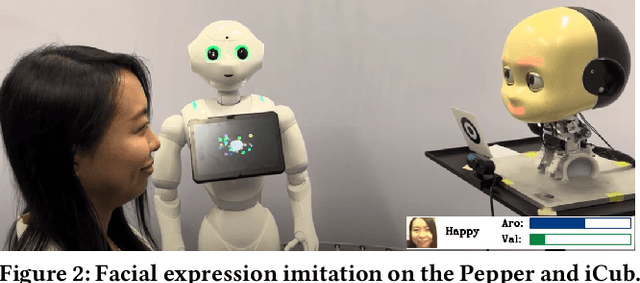
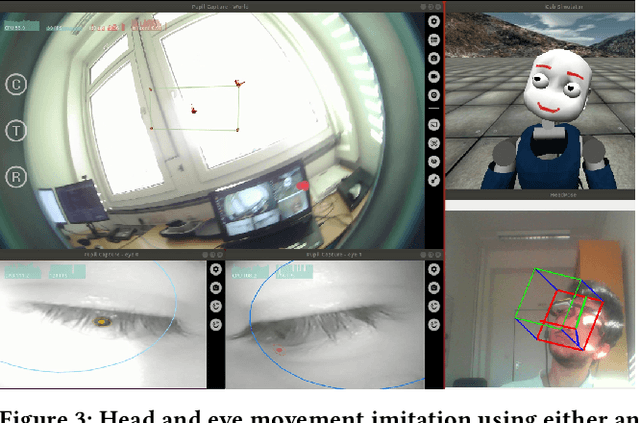
Message-oriented and robotics middleware play an important role in facilitating robot control, abstracting complex functionality and unifying communication patterns across networks of sensors and devices. However, the use of multiple middleware frameworks presents a challenge in integrating different robots within a single system. To address this challenge, we present Wrapyfi, a Python wrapper supporting multiple message-oriented and robotics middleware, including ZeroMQ, YARP, ROS, and ROS 2. Wrapyfi also provides plugins for exchanging deep learning framework data, without additional encoding or preprocessing steps. Using Wrapyfi eases the development of scripts that run on multiple machines, thereby enabling cross-platform communication and workload distribution. We evaluated Wrapyfi in practical settings by conducting two user studies, using multiple sensors transmitting readings to deep learning models, and using robots such as the iCub and Pepper via different middleware. The results demonstrated Wrapyfi's usability in practice allowing for multi-middleware exchanges, and controlled process distribution in a real-world setting. More importantly, we showcase Wrapify's most prominent features by bridging interactions between sensors, deep learning models, and robotic platforms.