 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWorld Model Based Sim2Real Transfer for Visual Navigation
Paper and Code
Oct 28, 2023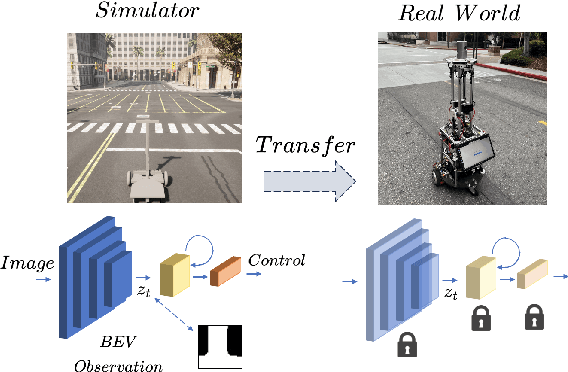
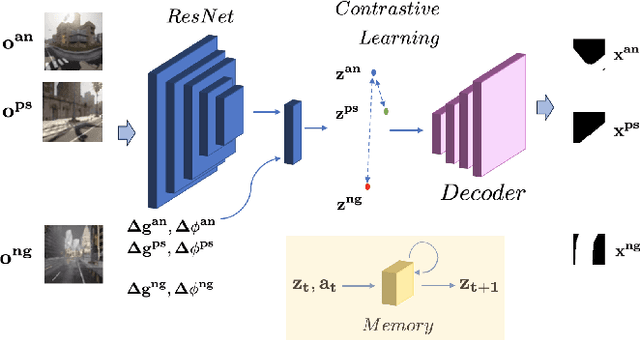
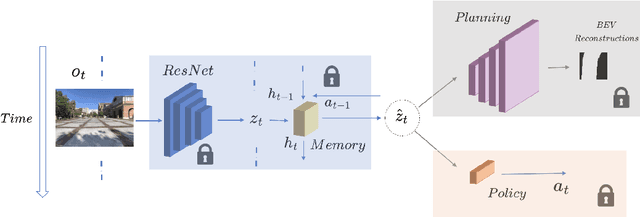
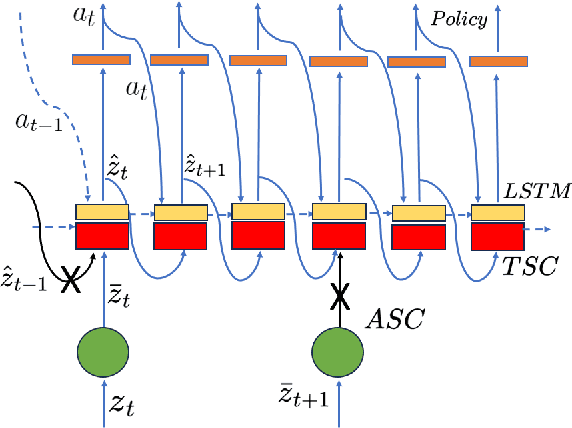
Sim2Real transfer has gained popularity because it helps transfer from inexpensive simulators to real world. This paper presents a novel system that fuses components in a traditional \textit{World Model} into a robust system, trained entirely within a simulator, that \textit{Zero-Shot} transfers to the real world. To facilitate transfer, we use an intermediary representation that are based on \textit{Bird's Eye View (BEV)} images. Thus, our robot learns to navigate in a simulator by first learning to translate from complex \textit{First-Person View (FPV)} based RGB images to BEV representations, then learning to navigate using those representations. Later, when tested in the real world, the robot uses the perception model that translates FPV-based RGB images to embeddings that are used by the downstream policy. The incorporation of state-checking modules using \textit{Anchor images} and \textit{Mixture Density LSTM} not only interpolates uncertain and missing observations but also enhances the robustness of the model when exposed to the real-world environment. We trained the model using data collected using a \textit{Differential drive} robot in the CARLA simulator. Our methodology's effectiveness is shown through the deployment of trained models onto a \textit{Real world Differential drive} robot. Lastly we release a comprehensive codebase, dataset and models for training and deployment that are available to the public.