 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhen Robots Get Chatty: Grounding Multimodal Human-Robot Conversation and Collaboration
Paper and Code
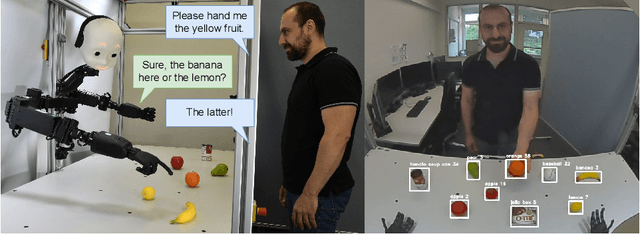
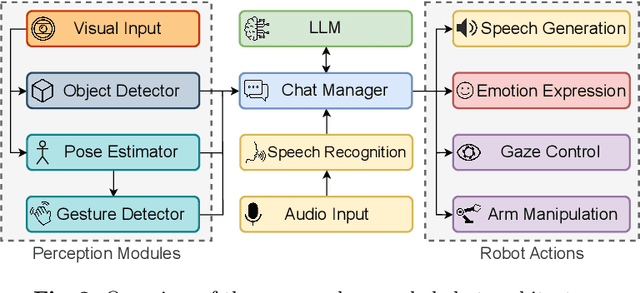
We investigate the use of Large Language Models (LLMs) to equip neural robotic agents with human-like social and cognitive competencies, for the purpose of open-ended human-robot conversation and collaboration. We introduce a modular and extensible methodology for grounding an LLM with the sensory perceptions and capabilities of a physical robot, and integrate multiple deep learning models throughout the architecture in a form of system integration. The integrated models encompass various functions such as speech recognition, speech generation, open-vocabulary object detection, human pose estimation, and gesture detection, with the LLM serving as the central text-based coordinating unit. The qualitative and quantitative results demonstrate the huge potential of LLMs in providing emergent cognition and interactive language-oriented control of robots in a natural and social manner.