 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhen Do Drivers Concentrate? Attention-based Driver Behavior Modeling With Deep Reinforcement Learning
Paper and Code
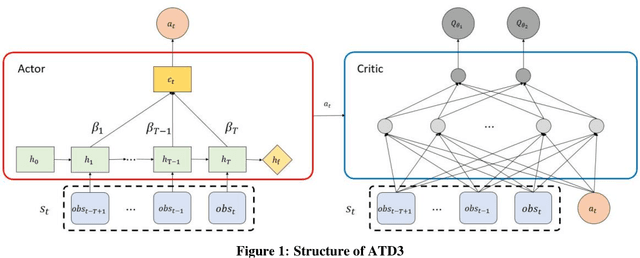
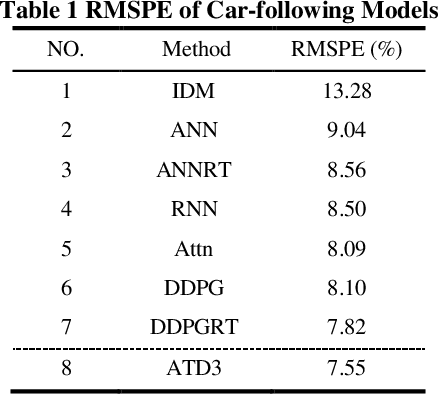


Driver distraction a significant risk to driving safety. Apart from spatial domain, research on temporal inattention is also necessary. In this paper, we propose an actor-critic method - Attention-based Twin Delayed Deep Deterministic policy gradient (ATD3) algorithm to approximate a driver's action according to observations and measure the driver's attention allocation for consecutive time steps in car-following model. Considering reaction time, we construct the attention mechanism in the actor network to capture temporal dependencies of consecutive observations. In the critic network, we employ Twin Delayed Deep Deterministic policy gradient algorithm (TD3) to address overestimated value estimates persisting in the actor-critic algorithm. We conduct experiments on real-world vehicle trajectory datasets and show that the accuracy of our proposed approach outperforms seven baseline algorithms. Moreover, the results reveal that the attention of the drivers in smooth vehicles is uniformly distributed in previous observations while they keep their attention to recent observations when sudden decreases of relative speeds occur. This study is the first contribution to drivers' temporal attention.