 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat Truly Matters in Trajectory Prediction for Autonomous Driving?
Paper and Code
Jun 27, 2023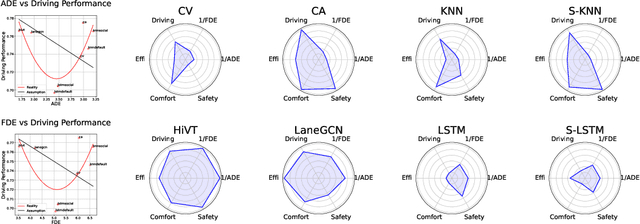



In the autonomous driving system, trajectory prediction plays a vital role in ensuring safety and facilitating smooth navigation. However, we observe a substantial discrepancy between the accuracy of predictors on fixed datasets and their driving performance when used in downstream tasks. This discrepancy arises from two overlooked factors in the current evaluation protocols of trajectory prediction: 1) the dynamics gap between the dataset and real driving scenario; and 2) the computational efficiency of predictors. In real-world scenarios, prediction algorithms influence the behavior of autonomous vehicles, which, in turn, alter the behaviors of other agents on the road. This interaction results in predictor-specific dynamics that directly impact prediction results. As other agents' responses are predetermined on datasets, a significant dynamics gap arises between evaluations conducted on fixed datasets and actual driving scenarios. Furthermore, focusing solely on accuracy fails to address the demand for computational efficiency, which is critical for the real-time response required by the autonomous driving system. Therefore, in this paper, we demonstrate that an interactive, task-driven evaluation approach for trajectory prediction is crucial to reflect its efficacy for autonomous driving.