 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat Should I Know? Using Meta-gradient Descent for Predictive Feature Discovery in a Single Stream of Experience
Paper and Code
Jun 13, 2022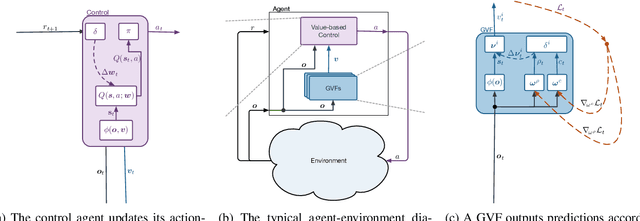
In computational reinforcement learning, a growing body of work seeks to construct an agent's perception of the world through predictions of future sensations; predictions about environment observations are used as additional input features to enable better goal-directed decision-making. An open challenge in this line of work is determining from the infinitely many predictions that the agent could possibly make which predictions might best support decision-making. This challenge is especially apparent in continual learning problems where a single stream of experience is available to a singular agent. As a primary contribution, we introduce a meta-gradient descent process by which an agent learns 1) what predictions to make, 2) the estimates for its chosen predictions, and 3) how to use those estimates to generate policies that maximize future reward -- all during a single ongoing process of continual learning. In this manuscript we consider predictions expressed as General Value Functions: temporally extended estimates of the accumulation of a future signal. We demonstrate that through interaction with the environment an agent can independently select predictions that resolve partial-observability, resulting in performance similar to expertly specified GVFs. By learning, rather than manually specifying these predictions, we enable the agent to identify useful predictions in a self-supervised manner, taking a step towards truly autonomous systems.