Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat Should I Do Now? Marrying Reinforcement Learning and Symbolic Planning
Paper and Code
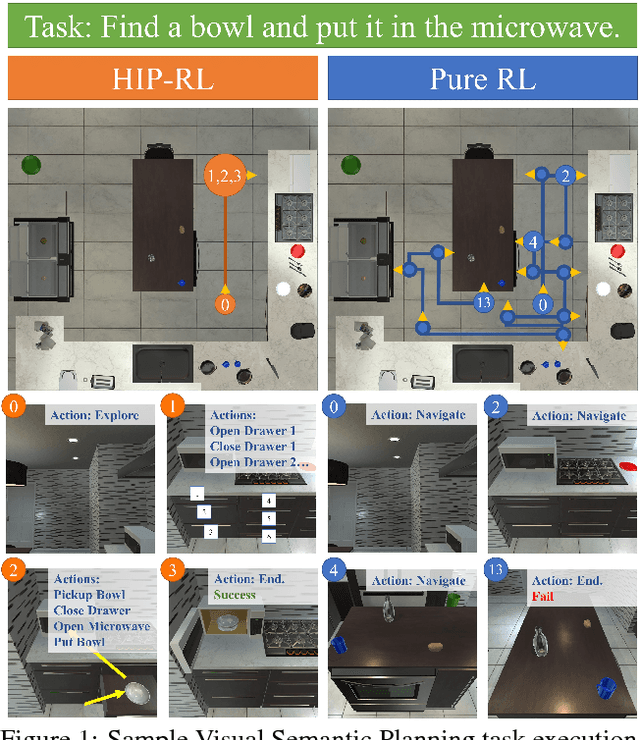
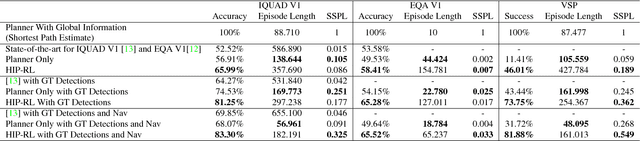

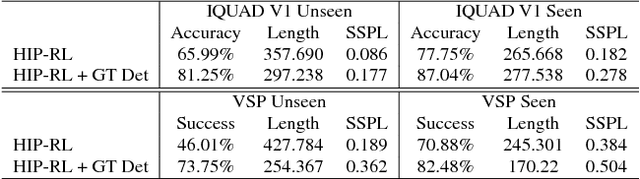
Long-term planning poses a major difficulty to many reinforcement learning algorithms. This problem becomes even more pronounced in dynamic visual environments. In this work we propose Hierarchical Planning and Reinforcement Learning (HIP-RL), a method for merging the benefits and capabilities of Symbolic Planning with the learning abilities of Deep Reinforcement Learning. We apply HIPRL to the complex visual tasks of interactive question answering and visual semantic planning and achieve state-of-the-art results on three challenging datasets all while taking fewer steps at test time and training in fewer iterations. Sample results can be found at youtu.be/0TtWJ_0mPfI
* Currently under review
View paper on