 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat's in my Room? Object Recognition on Indoor Panoramic Images
Paper and Code
Oct 14, 2019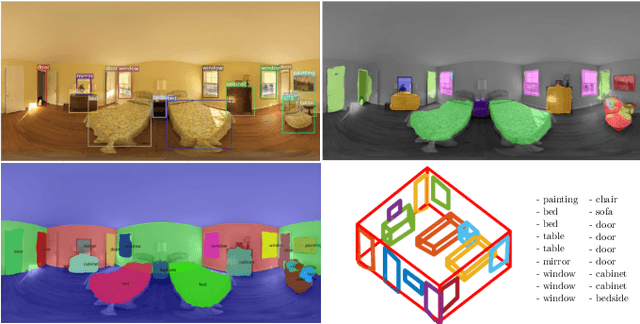
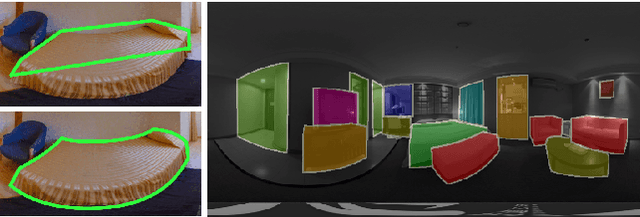
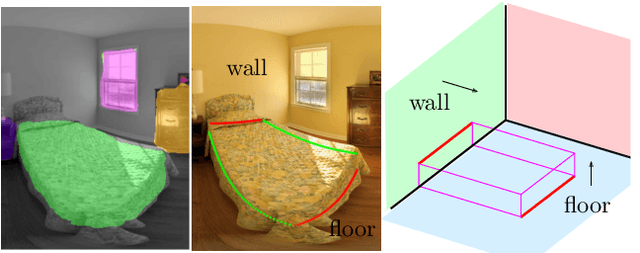
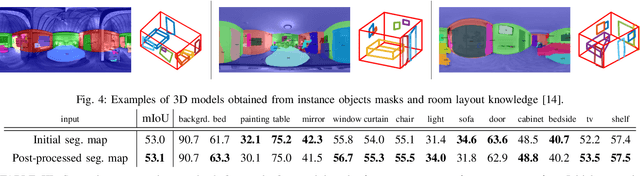
In the last few years, there has been a growing interest in taking advantage of the 360 panoramic images potential, while managing the new challenges they imply. While several tasks have been improved thanks to the contextual information these images offer, object recognition in indoor scenes still remains a challenging problem that has not been deeply investigated. This paper provides an object recognition system that performs object detection and semantic segmentation tasks by using a deep learning model adapted to match the nature of equirectangular images. From these results, instance segmentation masks are recovered, refined and transformed into 3D bounding boxes that are placed into the 3D model of the room. Quantitative and qualitative results support that our method outperforms the state of the art by a large margin and show a complete understanding of the main objects in indoor scenes.