 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat Makes a Place? Building Bespoke Place Dependent Object Detectors for Robotics
Paper and Code
Aug 07, 2017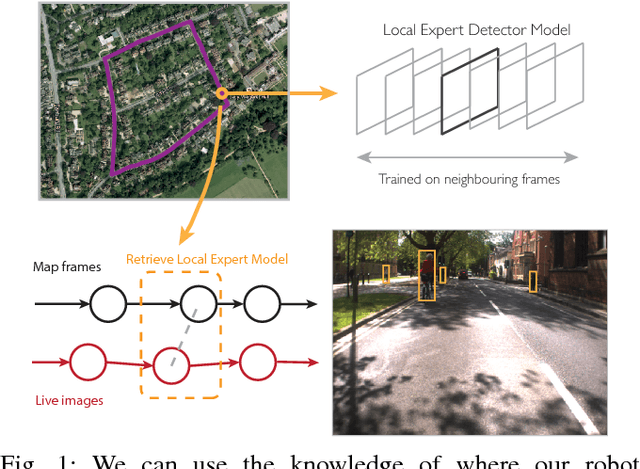

This paper is about enabling robots to improve their perceptual performance through repeated use in their operating environment, creating local expert detectors fitted to the places through which a robot moves. We leverage the concept of 'experiences' in visual perception for robotics, accounting for bias in the data a robot sees by fitting object detector models to a particular place. The key question we seek to answer in this paper is simply: how do we define a place? We build bespoke pedestrian detector models for autonomous driving, highlighting the necessary trade off between generalisation and model capacity as we vary the extent of the place we fit to. We demonstrate a sizeable performance gain over a current state-of-the-art detector when using computationally lightweight bespoke place-fitted detector models.