 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat is the appropriate speed for an autonomous vehicle? Designing a Pedestrian Aware Contextual Speed Controller
Paper and Code
Apr 13, 2021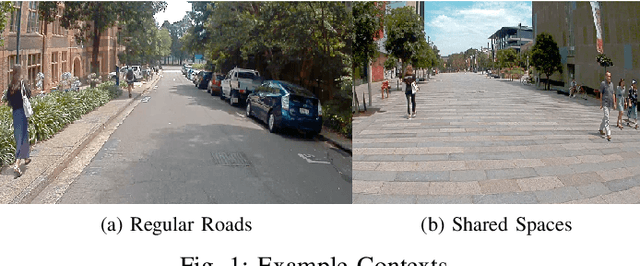

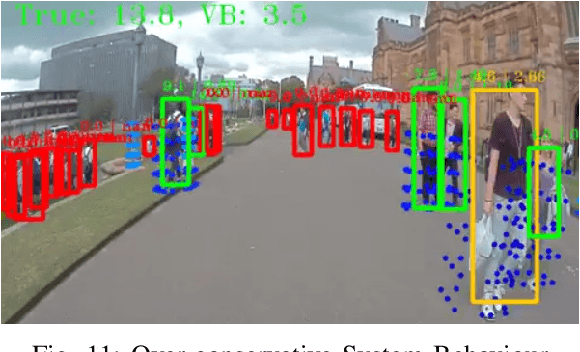

Social acceptance is a major hurdle for autonomous vehicle technology, central to which is ensuring both passengers and nearby pedestrians feel safe. This idea of `feeling safe' and perceived safety is highly subjective and rooted in human intuition. As such, traditional analytical approaches to autonomous navigation often fail to cater for the social expectations of individuals. Therefore, this paper proposes an approach to capture the complexity of social expectations and integrate this complexity into a 3-layered Contextual Speed Controller. The layers were; the legal road speed limit, the socially acceptable speed given the number of nearby pedestrians, and the socially acceptable speed based on proximity to nearby pedestrians. An implementation of this layered approach was tested in areas of both low and high vehicle-pedestrian interactions. From the experiments conducted, the lower two layers were seen working in tandem to modulate the vehicle speed to appropriate levels that mimicked conservative human driver behaviour. In summary, this work quantified the relationship between pedestrian context and socially acceptable vehicle speeds, allowing for more perceivably safe autonomous driving. Furthermore, the need for different driving schemes for navigating different road environments was identified.