 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWeakly Supervised Relative Spatial Reasoning for Visual Question Answering
Paper and Code
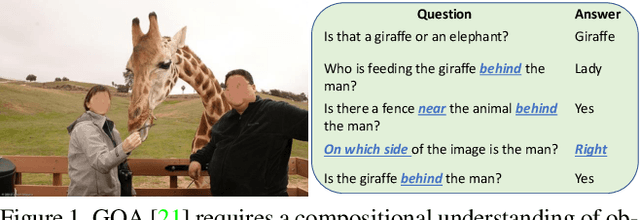

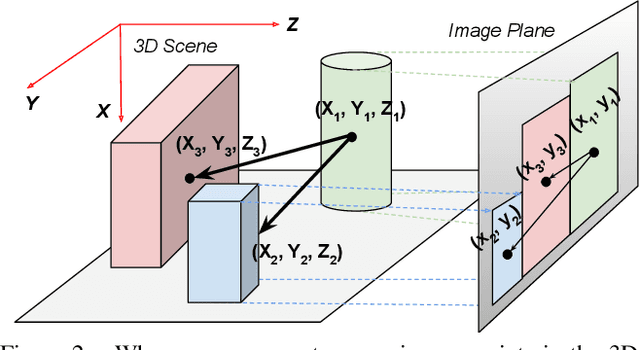

Vision-and-language (V\&L) reasoning necessitates perception of visual concepts such as objects and actions, understanding semantics and language grounding, and reasoning about the interplay between the two modalities. One crucial aspect of visual reasoning is spatial understanding, which involves understanding relative locations of objects, i.e.\ implicitly learning the geometry of the scene. In this work, we evaluate the faithfulness of V\&L models to such geometric understanding, by formulating the prediction of pair-wise relative locations of objects as a classification as well as a regression task. Our findings suggest that state-of-the-art transformer-based V\&L models lack sufficient abilities to excel at this task. Motivated by this, we design two objectives as proxies for 3D spatial reasoning (SR) -- object centroid estimation, and relative position estimation, and train V\&L with weak supervision from off-the-shelf depth estimators. This leads to considerable improvements in accuracy for the "GQA" visual question answering challenge (in fully supervised, few-shot, and O.O.D settings) as well as improvements in relative spatial reasoning. Code and data will be released \href{https://github.com/pratyay-banerjee/weak_sup_vqa}{here}.