 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Reasoning with Natural Language
Paper and Code
Oct 02, 2017
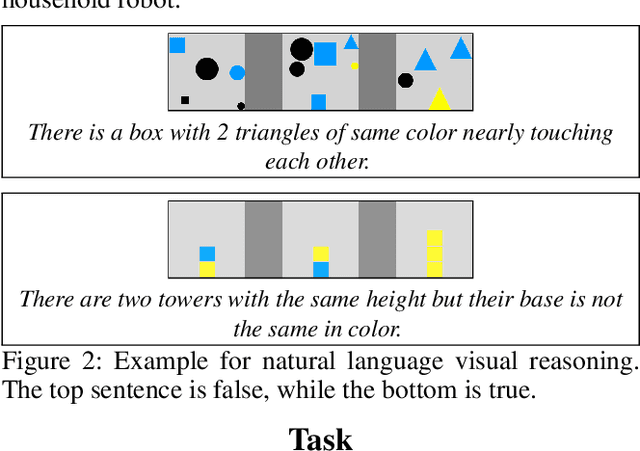
Natural language provides a widely accessible and expressive interface for robotic agents. To understand language in complex environments, agents must reason about the full range of language inputs and their correspondence to the world. Such reasoning over language and vision is an open problem that is receiving increasing attention. While existing data sets focus on visual diversity, they do not display the full range of natural language expressions, such as counting, set reasoning, and comparisons. We propose a simple task for natural language visual reasoning, where images are paired with descriptive statements. The task is to predict if a statement is true for the given scene. This abstract describes our existing synthetic images corpus and our current work on collecting real vision data.