Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual navigation for airborne control of ground robots from tethered platform: creation of the first prototype
Paper and Code
Jan 05, 2019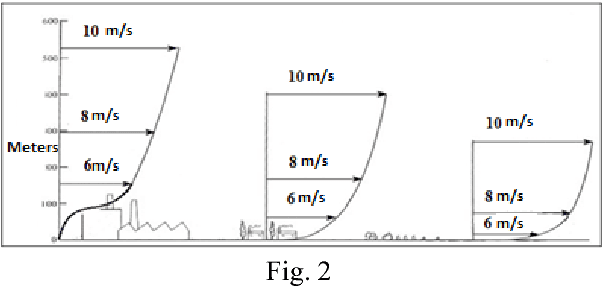
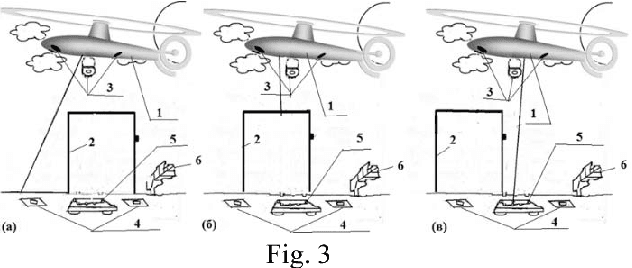
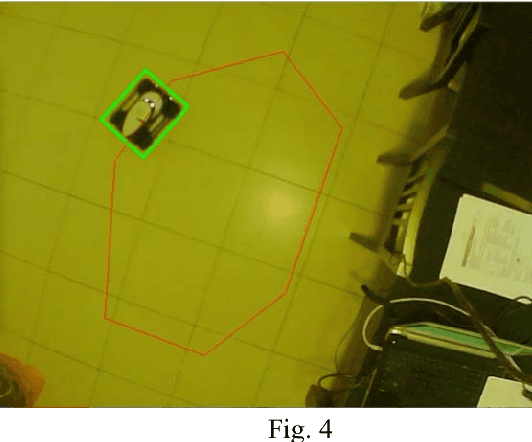
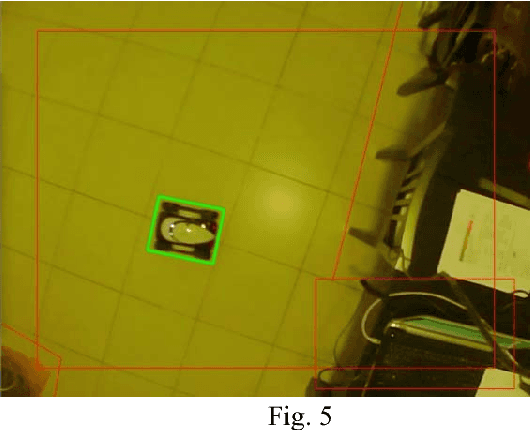
We propose control systems for the coordination of the ground robots. We develop robot efficient coordination using the devices located on towers or a tethered aerial apparatus tracing the robots on controlled area and supervising their environment including natural and artificial markings. The simple prototype of such a system was created in the Laboratory of Applied Mathematics of Ariel University (under the supervision of Prof. Domoshnitsky Alexander) in collaboration with company TRANSIST VIDEO LLC (Skolkovo, Moscow). We plan to create much more complicated prototype using Kamin grant (Israel)
* Proceeding of the IEEE International Conference on New Trends in
Engineering and Technology, September 2018, GRTIET, Tirupathiy, Chennai,
Tamil Nadu, India * 11 pages, 7 figures
View paper on