 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Diagnostics for Deep Reinforcement Learning Policy Development
Paper and Code
Sep 26, 2018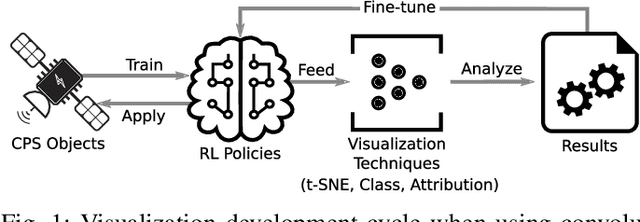

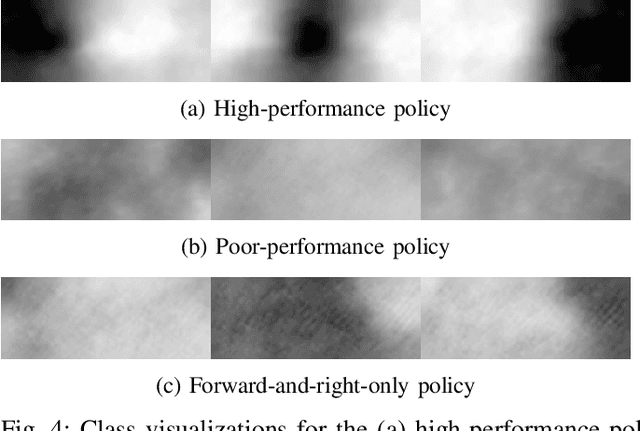
Modern vision-based reinforcement learning techniques often use convolutional neural networks (CNN) as universal function approximators to choose which action to take for a given visual input. Until recently, CNNs have been treated like black-box functions, but this mindset is especially dangerous when used for control in safety-critical settings. In this paper, we present our extensions of CNN visualization algorithms to the domain of vision-based reinforcement learning. We use a simulated drone environment as an example scenario. These visualization algorithms are an important tool for behavior introspection and provide insight into the qualities and flaws of trained policies when interacting with the physical world. A video may be seen at https://sites.google.com/view/drlvisual .