 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-Based Reactive Planning and Control of Quadruped Robots in Unstructured Dynamic Environments
Paper and Code
Jul 17, 2023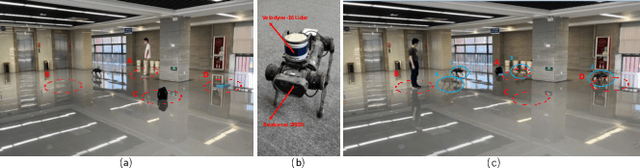
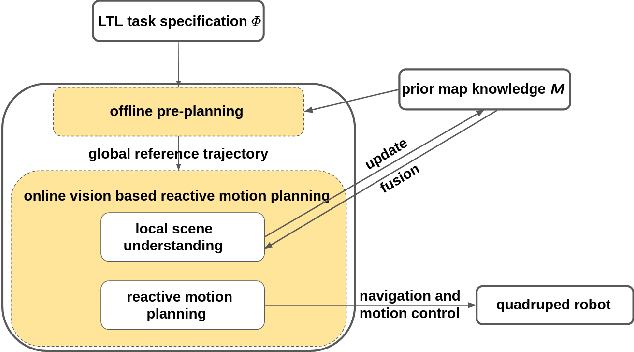

Quadruped robots have received increasing attention for the past few years. However, existing works primarily focus on static environments or assume the robot has full observations of the environment. This limits their practical applications since real-world environments are often dynamic and partially observable. To tackle these issues, vision-based reactive planning and control (V-RPC) is developed in this work. The V-RPC comprises two modules: offline pre-planning and online reactive planning. The pre-planning phase generates a reference trajectory over continuous workspace via sampling-based methods using prior environmental knowledge, given an LTL specification. The online reactive module dynamically adjusts the reference trajectory and control based on the robot's real-time visual perception to adapt to environmental changes.