 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeViewpoint Planning based on Shape Completion for Fruit Mapping and Reconstruction
Paper and Code
Sep 30, 2022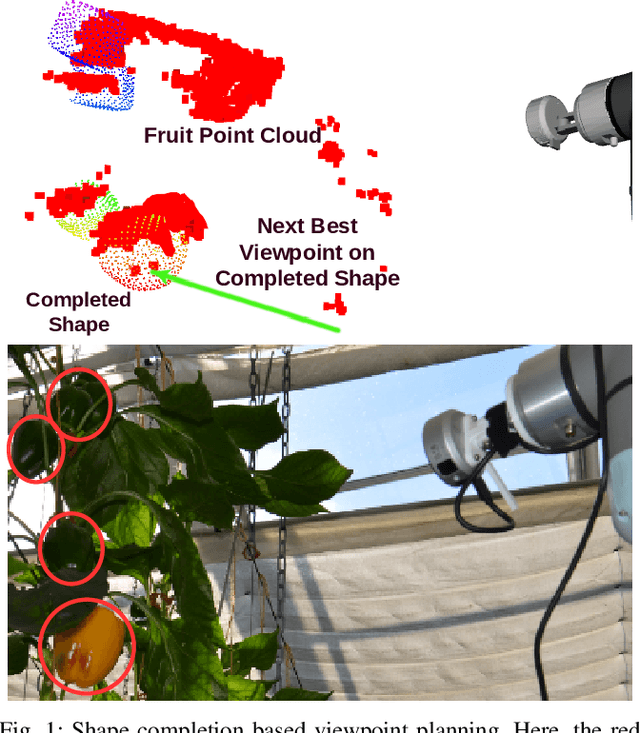
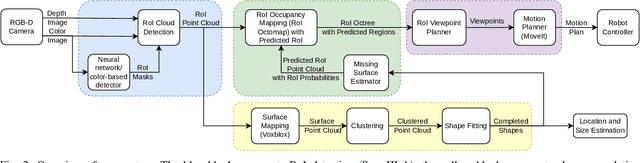
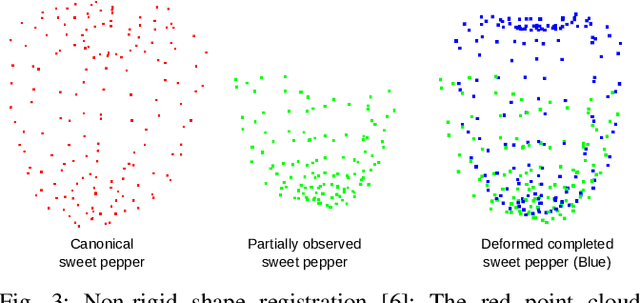
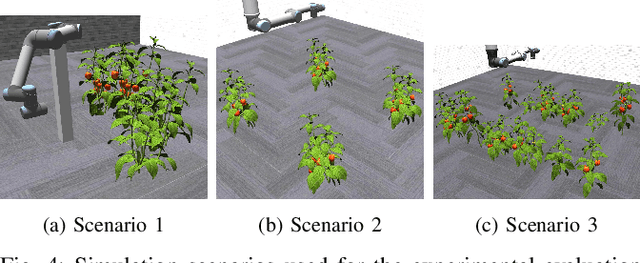
Robotic systems in agriculture do not only enable increasing automation of farming activities but also represent new challenges for robotics due to the unstructured environment and the non-rigid structures of crops. Especially, active perception for fruit mapping and harvesting is a difficult task since occlusions frequently occur and image segmentation provides only limited accuracy on the actual shape of the fruits. In this paper, we present a viewpoint planning approach that explictly uses the shape prediction from collected data to guide the sensor to view as yet unobserved parts of the fruits. We developed a novel pipeline for continuous interaction between prediction and observation to maximize the information gain about sweet pepper fruits. We adapted two different shape prediction approaches, namely parametric superellipsoid fitting and model based non-rigid latent space registration, and integrated them into our Region of Interest (RoI) viewpoint planner. Additionally, we used a new concept of viewpoint dissimilarity to aid the planner to select good viewpoints and for shortening the planning times. Our simulation experiments with a UR5e arm equipped with a Realsense L515 sensor provide a quantitative demonstration of the efficacy of our iterative shape completion based viewpoint planning. In comparative experiments with a state-of-the-art viewpoint planner, we demonstrate improvement not only in the estimation of the fruit sizes, but also in their reconstruction. Finally, we show the viability of our approach for mapping sweet peppers with a real robotic system in a commercial glasshouse.