 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVeTraSS: Vehicle Trajectory Similarity Search Through Graph Modeling and Representation Learning
Paper and Code
Apr 11, 2024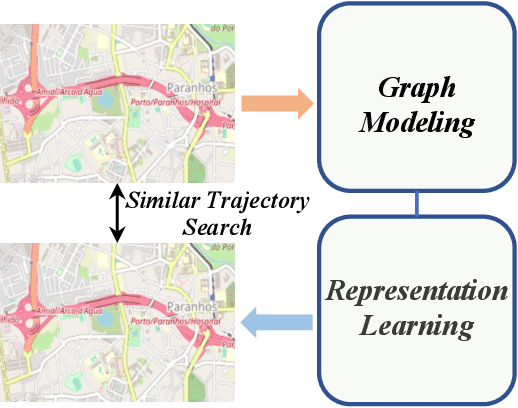

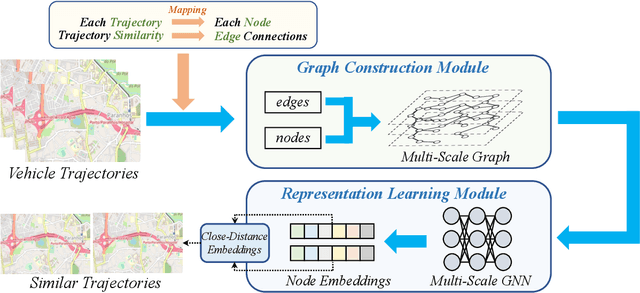

Trajectory similarity search plays an essential role in autonomous driving, as it enables vehicles to analyze the information and characteristics of different trajectories to make informed decisions and navigate safely in dynamic environments. Existing work on the trajectory similarity search task primarily utilizes sequence-processing algorithms or Recurrent Neural Networks (RNNs), which suffer from the inevitable issues of complicated architecture and heavy training costs. Considering the intricate connections between trajectories, using Graph Neural Networks (GNNs) for data modeling is feasible. However, most methods directly use existing mathematical graph structures as the input instead of constructing specific graphs from certain vehicle trajectory data. This ignores such data's unique and dynamic characteristics. To bridge such a research gap, we propose VeTraSS -- an end-to-end pipeline for Vehicle Trajectory Similarity Search. Specifically, VeTraSS models the original trajectory data into multi-scale graphs, and generates comprehensive embeddings through a novel multi-layer attention-based GNN. The learned embeddings can be used for searching similar vehicle trajectories. Extensive experiments on the Porto and Geolife datasets demonstrate the effectiveness of VeTraSS, where our model outperforms existing work and reaches the state-of-the-art. This demonstrates the potential of VeTraSS for trajectory analysis and safe navigation in self-driving vehicles in the real world.