 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVery Power Efficient Neural Time-of-Flight
Paper and Code
Dec 19, 2018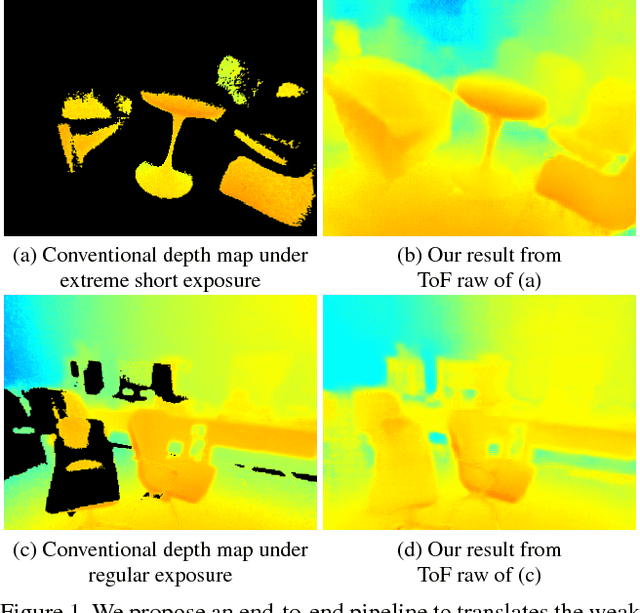
Time-of-Flight (ToF) cameras require active illumination to obtain depth information thus the power of illumination directly affects the performance of ToF cameras. Traditional ToF imaging algorithms is very sensitive to illumination and the depth accuracy degenerates rapidly with the power of it. Therefore, the design of a power efficient ToF camera always creates a painful dilemma for the illumination and the performance trade-off. In this paper, we show that despite the weak signals in many areas under extreme short exposure setting, these signals as a whole can be well utilized through a learning process which directly translates the weak and noisy ToF camera raw to depth map. This creates an opportunity to tackle the aforementioned dilemma and make a very power efficient ToF camera possible. To enable the learning, we collect a comprehensive dataset under a variety of scenes and photographic conditions by a specialized ToF camera. Experiments show that our method is able to robustly process ToF camera raw with the exposure time of one order of magnitude shorter than that used in conventional ToF cameras. In addition to evaluating our approach both quantitatively and qualitatively, we also discuss its implication to designing the next generation power efficient ToF cameras. We will make our dataset and code publicly available.