 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVehicle-group-based Crash Risk Formation and Propagation Analysis for Expressways
Paper and Code
Feb 19, 2024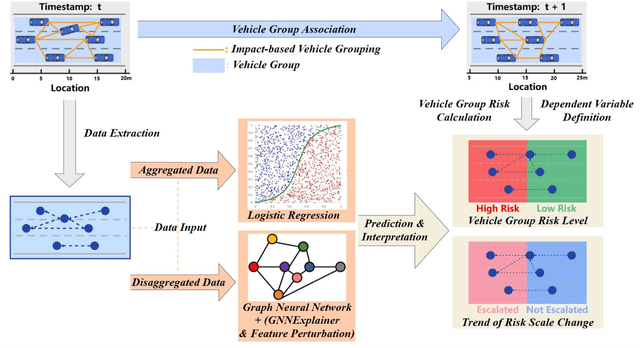
Previous studies in predicting crash risk primarily associated the number or likelihood of crashes on a road segment with traffic parameters or geometric characteristics of the segment, usually neglecting the impact of vehicles' continuous movement and interactions with nearby vehicles. Advancements in communication technologies have empowered driving information collected from surrounding vehicles, enabling the study of group-based crash risks. Based on high-resolution vehicle trajectory data, this research focused on vehicle groups as the subject of analysis and explored risk formation and propagation mechanisms considering features of vehicle groups and road segments. Several key factors contributing to crash risks were identified, including past high-risk vehicle-group states, complex vehicle behaviors, high percentage of large vehicles, frequent lane changes within a vehicle group, and specific road geometries. A multinomial logistic regression model was developed to analyze the spatial risk propagation patterns, which were classified based on the trend of high-risk occurrences within vehicle groups. The results indicated that extended periods of high-risk states, increase in vehicle-group size, and frequent lane changes are associated with adverse risk propagation patterns. Conversely, smoother traffic flow and high initial crash risk values are linked to risk dissipation. Furthermore, the study conducted sensitivity analysis on different types of classifiers, prediction time intervalsss and adaptive TTC thresholds. The highest AUC value for vehicle-group risk prediction surpassed 0.93. The findings provide valuable insights to researchers and practitioners in understanding and prediction of vehicle-group safety, ultimately improving active traffic safety management and operations of Connected and Autonomous Vehicles.