 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVector-Symbolic Architecture for Event-Based Optical Flow
Paper and Code
May 15, 2024


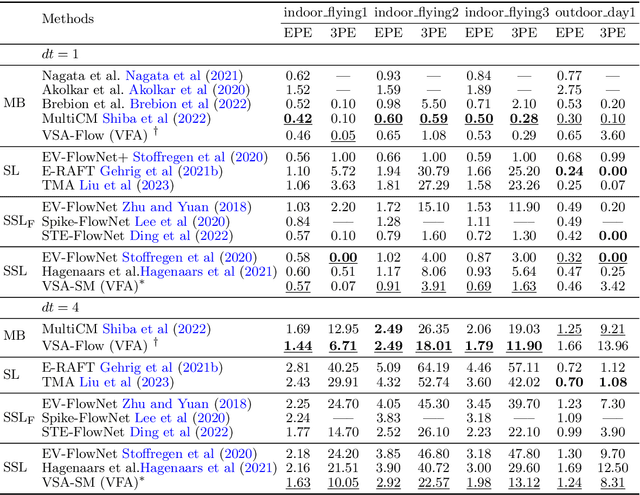
From a perspective of feature matching, optical flow estimation for event cameras involves identifying event correspondences by comparing feature similarity across accompanying event frames. In this work, we introduces an effective and robust high-dimensional (HD) feature descriptor for event frames, utilizing Vector Symbolic Architectures (VSA). The topological similarity among neighboring variables within VSA contributes to the enhanced representation similarity of feature descriptors for flow-matching points, while its structured symbolic representation capacity facilitates feature fusion from both event polarities and multiple spatial scales. Based on this HD feature descriptor, we propose a novel feature matching framework for event-based optical flow, encompassing both model-based (VSA-Flow) and self-supervised learning (VSA-SM) methods. In VSA-Flow, accurate optical flow estimation validates the effectiveness of HD feature descriptors. In VSA-SM, a novel similarity maximization method based on the HD feature descriptor is proposed to learn optical flow in a self-supervised way from events alone, eliminating the need for auxiliary grayscale images. Evaluation results demonstrate that our VSA-based method achieves superior accuracy in comparison to both model-based and self-supervised learning methods on the DSEC benchmark, while remains competitive among both methods on the MVSEC benchmark. This contribution marks a significant advancement in event-based optical flow within the feature matching methodology.