 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVariable Stiffness Control with Strict Frequency Domain Constraints for Physical Human-Robot Interaction
Paper and Code
Aug 09, 2020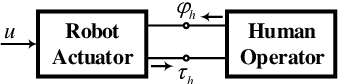
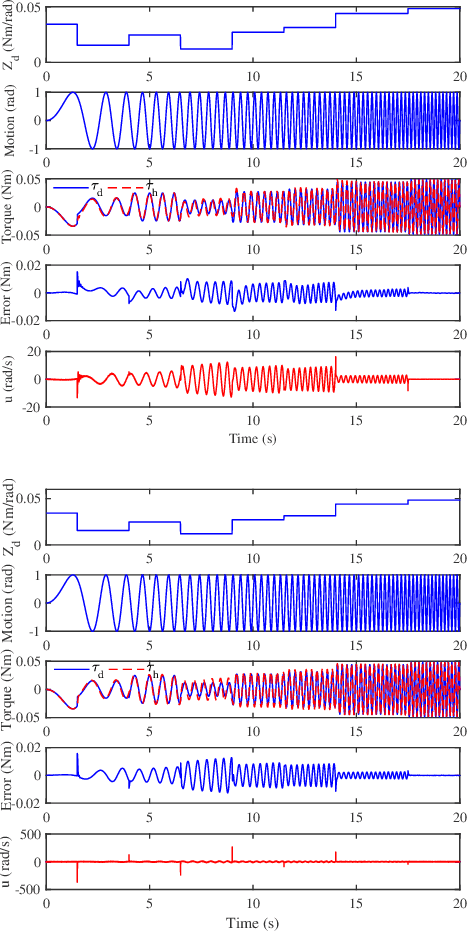
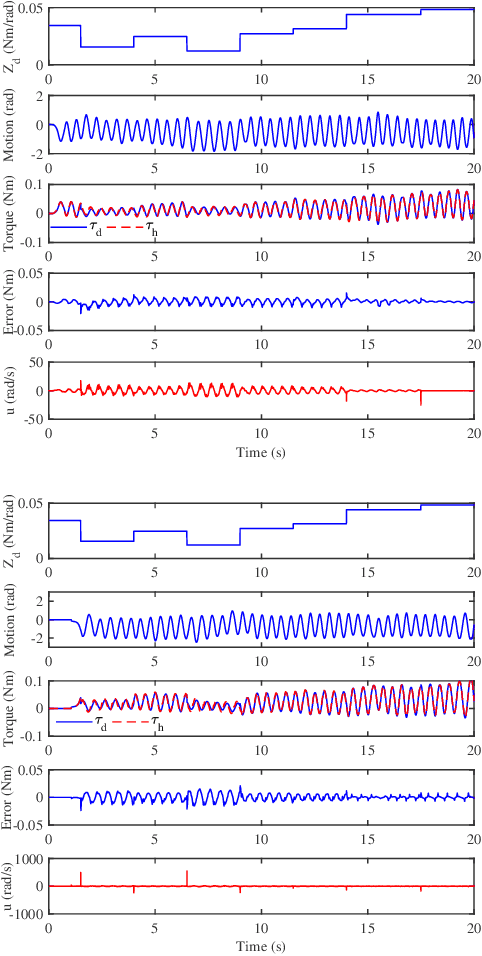

Variable impedance control is advantageous for physical human-robot interaction to improve safety, adaptability and many other aspects. This paper presents a gain-scheduled variable stiffness control approach under strict frequency-domain constraints. Firstly, to reduce conservativeness, we characterize and constrain the impedance rendering, actuator saturation, disturbance/noise rejection and passivity requirements into their specific frequency bands. This relaxation makes sense because of the restricted frequency properties of the interactive robots. Secondly, a gain-scheduled method is taken to regulate the controller gains with respect to the desired stiffness. Thirdly, the scheduling function is parameterized via a nonsmooth optimization method. Finally, the proposed approach is validated by simulations, experiments and comparisons with a gain-fixed passivity-based PID method.