 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeV2V-PoseNet: Voxel-to-Voxel Prediction Network for Accurate 3D Hand and Human Pose Estimation from a Single Depth Map
Paper and Code
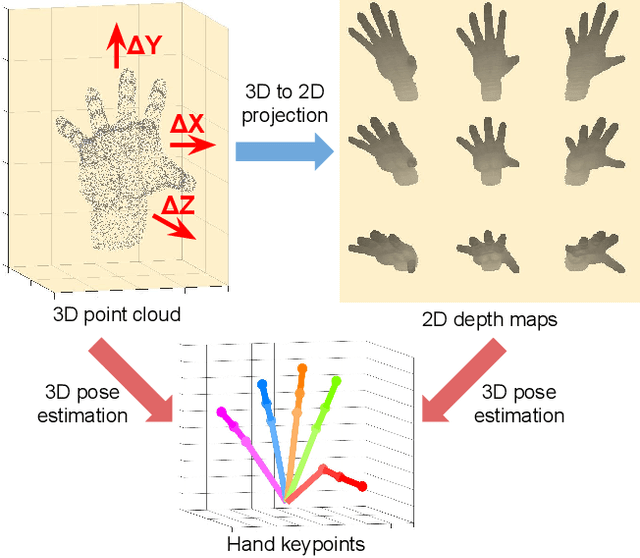
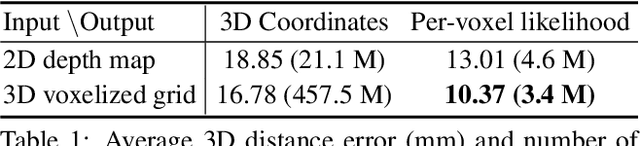


Most of the existing deep learning-based methods for 3D hand and human pose estimation from a single depth map are based on a common framework that takes a 2D depth map and directly regresses the 3D coordinates of keypoints, such as hand or human body joints, via 2D convolutional neural networks (CNNs). The first weakness of this approach is the presence of perspective distortion in the 2D depth map. While the depth map is intrinsically 3D data, many previous methods treat depth maps as 2D images that can distort the shape of the actual object through projection from 3D to 2D space. This compels the network to perform perspective distortion-invariant estimation. The second weakness of the conventional approach is that directly regressing 3D coordinates from a 2D image is a highly non-linear mapping, which causes difficulty in the learning procedure. To overcome these weaknesses, we firstly cast the 3D hand and human pose estimation problem from a single depth map into a voxel-to-voxel prediction that uses a 3D voxelized grid and estimates the per-voxel likelihood for each keypoint. We design our model as a 3D CNN that provides accurate estimates while running in real-time. Our system outperforms previous methods in almost all publicly available 3D hand and human pose estimation datasets and placed first in the HANDS 2017 frame-based 3D hand pose estimation challenge. The code is available in https://github.com/mks0601/V2V-PoseNet_RELEASE.