 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUWED: Unsigned Distance Field for Accurate 3D Scene Representation and Completion
Paper and Code
Mar 17, 2022
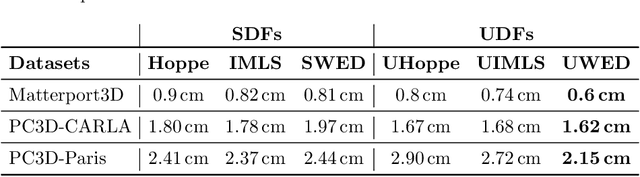
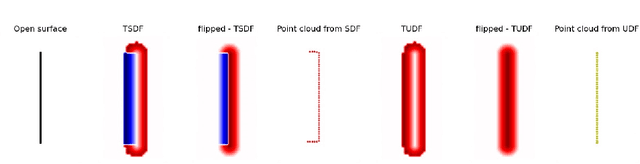

Scene Completion is the task of completing missing geometry from a partial scan of a scene. The majority of previous methods compute an implicit representation from range data using a Truncated Signed Distance Function (TSDF) on a 3D grid as input to neural networks. The truncation limits but does not remove the ambiguous cases introduced by the sign for non-closed surfaces. As an alternative, we present an Unsigned Distance Function (UDF) called Unsigned Weighted Euclidean Distance (UWED) as input to the scene completion neural networks. UWED is simple and efficient as a surface representation, and can be computed on any noisy point cloud without normals. To obtain the explicit geometry, we present a method for extracting a point cloud from discretized UDF values on a regular grid. We compare different SDFs and UDFs for the scene completion task on indoor and outdoor point clouds collected from RGB-D and LiDAR sensors and show improved completion using the proposed UWED function.