 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUtility Decomposition with Deep Corrections for Scalable Planning under Uncertainty
Paper and Code
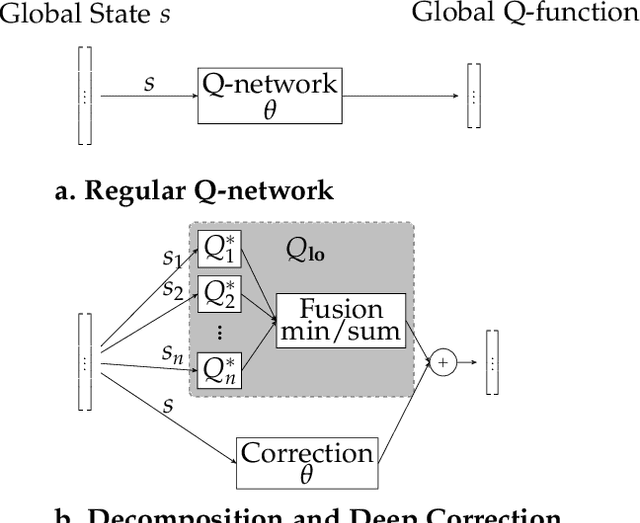
Decomposition methods have been proposed in the past to approximate solutions to large sequential decision making problems. In contexts where an agent interacts with multiple entities, utility decomposition can be used where each individual entity is considered independently. The individual utility functions are then combined in real time to solve the global problem. Although these techniques can perform well empirically, they sacrifice optimality. This paper proposes an approach inspired from multi-fidelity optimization to learn a correction term with a neural network representation. Learning this correction can significantly improve performance. We demonstrate this approach on a pedestrian avoidance problem for autonomous driving. By leveraging strategies to avoid a single pedestrian, the decomposition method can scale to avoid multiple pedestrians. We verify empirically that the proposed correction method leads to a significant improvement over the decomposition method alone and outperforms a policy trained on the full scale problem without utility decomposition.