 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Inertial Sensors for Position and Orientation Estimation
Paper and Code
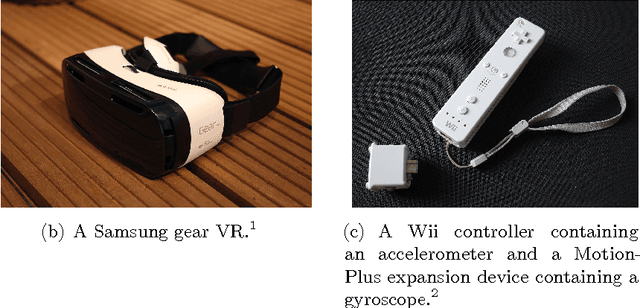

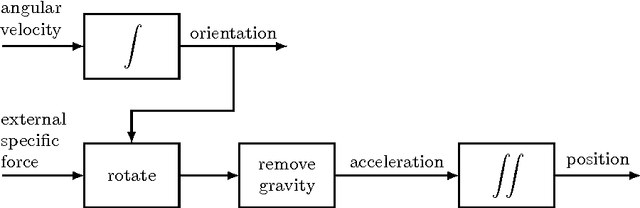
In recent years, MEMS inertial sensors (3D accelerometers and 3D gyroscopes) have become widely available due to their small size and low cost. Inertial sensor measurements are obtained at high sampling rates and can be integrated to obtain position and orientation information. These estimates are accurate on a short time scale, but suffer from integration drift over longer time scales. To overcome this issue, inertial sensors are typically combined with additional sensors and models. In this tutorial we focus on the signal processing aspects of position and orientation estimation using inertial sensors. We discuss different modeling choices and a selected number of important algorithms. The algorithms include optimization-based smoothing and filtering as well as computationally cheaper extended Kalman filter and complementary filter implementations. The quality of their estimates is illustrated using both experimental and simulated data.