Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Convolutional Neural Networks in Robots with Limited Computational Resources: Detecting NAO Robots while Playing Soccer
Paper and Code
Jun 20, 2017
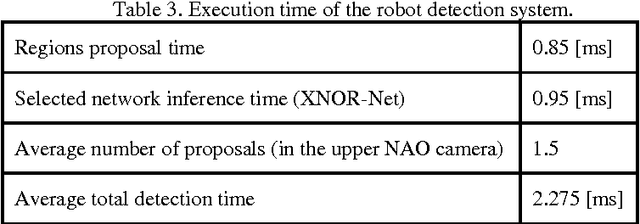
The main goal of this paper is to analyze the general problem of using Convolutional Neural Networks (CNNs) in robots with limited computational capabilities, and to propose general design guidelines for their use. In addition, two different CNN based NAO robot detectors that are able to run in real-time while playing soccer are proposed. One of the detectors is based on the XNOR-Net and the other on the SqueezeNet. Each detector is able to process a robot object-proposal in ~1ms, with an average number of 1.5 proposals per frame obtained by the upper camera of the NAO. The obtained detection rate is ~97%.
* Accepted in the RoboCup Symposium 2017. Final version will be
published at Springer
View paper on